
Abstract
The growing interest in reconfigurable intelligent surfaces (RIS) for wireless communications is evident, particularly in addressing challenges beyond the normal incidence condition of electromagnetic waves. This paper introduces an innovative approach to achieve beam steering in reflecting-type array structures, specifically reflectarrays, through the use of Reconfigurable Electro-Mechanical Reflectarray (REMR) technology. The REMR structure, equipped with a cam-shaped actuator beneath each unit cell’s ground plane, serves as the basis for this design. The proposed design involves multiple reflective strips at variable heights, enabling significant adaptability to incident waves at various angles. By incorporating a cam-shaped actuator beneath the ground plane of each unit cell, a mechanical phase shifter acts as a continuous modifier of phase for incident waves, resulting in the realization of the REMR effect. The REMR structure demonstrates consistent phase and amplitude responses, facilitating efficient beam steering. Simulation and measurement results show a remarkable unwrapped phase shift range of \(\sim 200^\circ \) and beam steering over a broad spectrum of incidence angles from \(0^\circ \) to \(70^\circ \). Additionally, the REMR structure maintains stability even when powered off in the “defined gradient mode” due to a memory function preserving gradient states. The fabrication process utilizes 3D printers, offering flexibility and ease of customization. This comprehensive approach holds significant potential for advancing RIS technologies.
Similar content being viewed by others

Introduction
As the demand for higher data rates in wireless communication networks continues to surge, researchers are actively exploring innovative solutions to enhance data transferability. Reconfigurable intelligent surfaces (RIS) have emerged as a promising technology in this regard1. The concept of continuous intelligent surfaces (CIS) and the fundamental limits of RIS-aided integrated sensing and communication (ISAC) systems are introduced2. Additionally, metasurfaces, a closely related concept, have demonstrated significant potential for beam scanning and steering, which can be integrated into RIS and CIS designs to improve efficiency and adaptability3. This work emphasizes the role of RIS in improving the efficiency of ISAC, particularly in complex wireless environments. The study demonstrates that RIS with optimized phase responses can enhance the received signal-to-noise ratio (SNR) and spectral efficiency of communication, leading to improved localization accuracy. Addressing challenges in vehicular communication, a hybrid vehicular-visible light communication (V-VLC)/V-RF approach with relaying and RIS-aided V-RF solutions is proposed4. The analysis, based on stochastic geometry, shows considerable enhancements in outage, throughput, and delay outage rate (DOR) compared to conventional V-RF with relaying. This strategy proves beneficial for urban vehicle-to-vehicle (V2V) communication, especially in scenarios with obstacles such as buildings and installations. In the context of overcoming path loss and shadowing issues in mmWave frequency scenarios, a compressive sensing-based adaptive beamforming algorithm utilizing RIS is presented5. Experimental validation with a 1-bit RIS testbed reveals significant improvements in bit error rate (BER) and signal-to-noise ratio (SNR) for the received signal. These findings suggest that RIS can effectively aid wireless communications, especially in challenging radio electromagnetic (EM) wave characteristics. Tile-based massively scalable MIMO and phased arrays for 5G/B5G millimeter-wave smart skins and reconfigurable intelligent surfaces are introduced in6. The tile-based approach allows for the modular construction of large arrays, demonstrating a proof-of-concept 29 GHz 32-element phased array with beamsteering capability. The scalability of this approach, even when wrapped around a curved surface, highlights its potential for practical conformal platforms in frequencies up to the sub-THz range. Collectively, these diverse studies showcase the potential of RIS in advancing wireless communication technologies. This paper contributes to this growing body of knowledge by proposing an innovative approach to achieving beam steering in reflecting-type array structures using Reconfigurable Electro-Mechanical Reflectarrays (REMR) technology. These advanced surfaces come equipped with beam steering control systems that enable improved signal delivery and enhanced data transfer capabilities. By leveraging beam steering, RIS technology can bypass obstacles such as buildings and walls that often interfere with signal delivery to specific targets. This allows for a significant improvement in signal delivery and an increase in available data space for users. As a result, RIS technology has attracted significant attention from both industry and academia. Overall, the use of RIS technology in wireless applications has the potential to revolutionize the way we communicate. By harnessing advanced beam steering control systems, these surfaces provide superior signal reflection and enhanced data transfer capabilities, rendering them a compelling choice for a diverse array of real-world applications. Reconfigurable reflectarray (RR) technology, as one of the emerging technologies, has gained attention as a promising communication technique that utilizes array structures to serve multiple users simultaneously7. However, in practical situations, the introduction of multipath propagation, particularly burdensome in urban areas, can present substantial challenges in effectively delivering signals to specific targets. To address this issue, RRs leverage beam steering to dynamically adjust signal trajectories, optimizing their paths and enhancing signal delivery precision. This capability significantly enriches the available data space for users, ensuring more reliable and efficient communication in complex urban environments. Several studies have explored the use of RRs for 5G applications, demonstrating the potential for improved signal quality, network performance, and user experience8,9,10,11. This technology is expected to play a crucial role in meeting the increasing demands for high-speed and reliable wireless communication in various applications, including IoT, smart cities, and smart indoor environments. While RIS technology and various beam steering methods, such as pin diodes, varactors, and MEMS switches, have shown great promise, they also introduce practical challenges. These methods often involve complex designs and high power consumption, which can limit their feasibility for large-scale implementations11,12,13,14,15,16. For instance, electronic phase shifters, though efficient for beam steering, tend to exhibit increased losses at higher frequencies, particularly in the millimeter-wave range, potentially degrading performance in 5G and beyond17,18. Furthermore, advanced materials like metamaterials, graphene, and liquid crystals, though offering compact and tunable designs, are typically constrained by limited bandwidth and efficiency, making them less viable for broad practical applications due to high production costs and reduced scalability19,20,21. These limitations highlight the need for innovative solutions, such as electro-mechanical RIS technology, which can overcome some of these hurdles by offering simpler designs and greater adaptability. However, the mechanical reliability and long-term operational durability of electro-mechanical systems remain areas that require further exploration, especially under varying environmental conditions and continuous usage. Using electro-mechanical phase shifting and the advent of electro-mechanical RISs eliminates these limitations in the field of wireless communication networks22,23. These advanced surfaces are equipped with electro-mechanical components that enable them to manipulate electromagnetic waves, resulting in enhanced signal delivery and improved data transfer capabilities. An electro-mechanical RIS can adapt to changing environmental conditions, such as obstacles or interference, through dynamic reconfiguration, which optimizes signal quality and coverage. By incorporating advanced beamforming and beam steering techniques, electro-mechanical RISs can significantly enhance the performance and capacity of networks, making them an attractive solution for wireless communication networks applications such as 5G23. These intelligent surfaces have garnered significant attention from both industry and academia due to their ability to overcome challenges such as obstacles and interference, making them a promising technology for the future of wireless communication networks. Various electro-mechanical techniques have been proposed to implement phase shifters in RIS, such as those described in22,23. However, these approaches have limitations that need to be addressed. For instance, the beam steering angle in22 is limited, and in23, the design and fabrication process can be complicated. In this work, a novel electro-mechanical method is proposed to achieve both beam steering and angular adaptability in reflecting-type array structures. The proposed method capitalizes on the mechanical movements of specific components within the structure. To achieve beam steering, the ground plane beneath the entire series of unit cells is vertically displaced, creating a phase shift gradient across the REMR. This gradient dictates the direction of the radiated beam by altering the capacity of the spatial capacitance. The phase shift is controlled using a cam rod-shape actuator. Numerical simulations demonstrate a significant unwrapped phase shift range of \(\sim 200^\circ \). One advantage of the proposed method is the absence of vias in the unit cell due to the lack of elements, which simplifies the fabrication process. The simplicity of the patch design further reduces complexity. Additionally, the structure of the REMR is straightforward and each part can be easily replaced, making it more manageable compared to other electronic or electromechanical configurations. The phase shift can be adjusted continuously by modifying the spacing of the spatial capacitor. Furthermore, the REMR structure is designed to maintain stability even in the “defined gradient mode” when powered off. It incorporates a memory function that preserves gradient arrangements. This feature ensures consistent performance and enhances the usability of the REMR structure. The simplicity, replaceability, and stability of the REMR structure contribute to its potential for practical applications in wireless communications. To exhibit the EM characteristics of the proposed structure, full-wave numerical simulations are implemented using the commercial software, CST Microwave Studio.

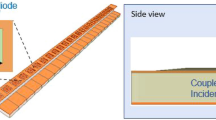
Schematic diagram of the phase shifter. (a) Top view of the unit cell. (b) Side view of the phase shifter. (c) Actuator for each column. (d) Ground plane for each column.
Methods
Unit cell analysis and REMR performance
The proposed spatial phase shifter unit cell (Fig. 1) comprises several key components: a dielectric substrate, an optimized sub-6 GHz metal patch on a Rogers RO4003C substrate (\(\varepsilon _r = 3.5\), \(t_1\)), a full ground plane, and a 3D-printed cam rod actuator. Fig. 1a shows the top view, highlighting the sub-6 GHz metal patch on the dielectric substrate, while Fig. 1b shows the lateral view, emphasizing the separation \(\Delta {Z}\) between the ground plane and the substrate, which is critical for optimal performance. To ensure effective subwavelength phase-shifting functionality, the unit cell period is designed to be less than half the wavelength (\(\lambda /2\)). The substrate is designed in a brick shape with a thickness denoted as \(t_2\), and it is positioned above the ground plane, maintaining a defined separation that enhances the overall performance of the phase shifter unit cell. The cam rod-shaped actuator, with a variable radius \(r\), allows movement from 0 mm to 5.5 mm. By rotating the actuator along the x-axis at an angle \(\alpha \), the ground plane is displaced along the z-axis, inducing a phase shift that depends on \(\alpha \). A gear connects the actuator to an external driving force. This unit cell functions as a resonator when subjected to an incident wave, inducing a phase shift through changes in the position of a variable capacitor. Unlike conventional phase shifters that rely on capacitance adjustments, this design eliminates the need for biasing elements, reducing complexity, vias, and the space allocated on the unit cell.The proposed design employs an \(E_y\) polarization unit cell excited by Floquet ports through boundary conditions. For beam steering, 20-unit cell columns share a common ground, with each column containing two actuators (as shown in Fig. 1c and Fig. 1d. The geometrical characteristics of the proposed phase shifter are detailed in Table 1.
In the reflective structures, when a thin layer unit cell is used, a plane wave may not see the ground because the thin layer behaves as a boundary condition for the incident wave. In the case of a thin layer unit cell, the layer is typically designed to reflect or manipulate the incident wave. The thin layer unit cell is often engineered to achieve desired phase shifts or other beam steering effects, and its properties are optimized for that purpose.
To calculate the shunt capacitance \({C_{\text {sh}}}\) in this design, where unit cell has a parallel plate capacitor, one can use the formulas as follow:
This equation represents the capacitance of the first layer (\(C_1\)) in terms of the permittivity of the first dielectric material (\(\varepsilon _1\)), and the thickness of the first dielectric layer (\(t_1\)).
This equation expresses the capacitance of the second layer (\(C_2\)) considering the permittivity of the vacuum (\(\varepsilon _2\)), and the distance (gap) between the layers (\(\Delta {Z}\)).
The shunt capacitance \({C_{\text {sh}}}\) is calculated using the equations (1) and (2).
To calculate the shunt inductance \({L_{\text {sh}}}\) in this design, one can use the formulas as follow:
The shunt inductance (\(L_{\text {sh}}\)) is determined by the permeability of the material (\(\mu \)), the thickness of the first dielectric layer (\(t_1\)), and the distance (gap) between the layers (\(\Delta {Z}\)).
The effective permittivity can be extracted from the (5)
which defines the effective permittivity (\(\varepsilon _{\text {eff}}\)) in the context of the structure, incorporating the dielectric constants of the PCB material (\(\varepsilon _1\)) and air (\(\varepsilon _2\)).
As it is mentioned in24,25 the resonant frequency (\(f_0\)) is
where
which is determined by the series and shunt inductances (\(L_{\text {sr}}\) and \(L_{\text {sh}}\)), and series and shunt capacitances (\(C_{\text {sr}}\) and \(C_{\text {sh}}\)) as shown in Equation (6).
The k-vector defines the direction of propagation of the electromagnetic wave. By manipulating the capacitance and inductance of the elements in the REMR, the k-vector can be altered, resulting in beam steering. Changing the k-vector allows the reflected beam to be directed in different directions, enabling beam scanning and control over the antenna’s radiation pattern.
The k-vector equation is
The concept of phase difference is essential in understanding how two waves are shifted concerning each other in terms of phase, measured in either degrees or radians. It primarily focuses on temporal aspects, characterizing the timing discrepancy between waves.
On the other hand, the wave vector (denoted as k) is a vector quantity that combines information about the magnitude and direction of a wave. This vector provides insights into the spatial characteristics of a wave, detailing its direction and magnitude in space. These equations are employed because they offer a quantitative means to describe and analyze wave phenomena.
In the context of the presented system, the fundamental principle hinges on the utilization of a spatial phase-shifting technique, as revealed by Equations (3), (5), and (6). This technique involves the intentional variation of the gap size (\(\Delta {Z}\)), exerting a direct influence on the local electromagnetic wave reflection phase. The magnitude of this phase shift is pivotal in achieving precise beam shaping and steering within the reflectarray system.
Equation (3) is instrumental in this process, serving as a tool to extract the necessary information for determining \(\Delta {Z}\). The calculated gap size (\(\Delta {Z}\)) is a critical parameter for subsequent computations, specifically for evaluating the effective dielectric constant, as indicated in Equation (5). The effective dielectric constant, influenced by the variation in gap size, plays a crucial role in shaping the phase shift characteristics of the reflectarray.
Now, regarding the phase shift caused by changing \(\Delta {Z}\), it’s crucial to understand that the capacitance of the second layer (\(C_2\)) is inversely proportional to \(\Delta {Z}\). As \(\Delta {Z}\) increases, \(C_2\) decreases. The effective capacitance (\(C_{\text {sh}}\)) is influenced by both \(C_1\) and \(C_2\). When \(\Delta {Z}\) changes, it affects the total capacitance (\(C_{\text {sh}}\)), which, in turn, influences the resonant frequency (\(f_0\)). The change in resonant frequency causes a phase shift in the reflected electromagnetic waves.
Equation (6) reinforces the significance of the phase shift characteristics in the overall functionality of the reflectarray. The precise control and manipulation of electromagnetic waves are achieved through a nuanced understanding and manipulation of the spatial phase-shifting technique. The equation encapsulates the intricate relationship between series and shunt inductances (\(L_{\text {sr}}\) and \(L_{\text {sh}}\)) and series and shunt capacitances (\(C_{\text {sr}}\) and \(C_{\text {sh}}\)), providing a comprehensive framework for resonant frequency determination.
In summary, by adjusting \(\Delta {Z}\), one is modifying the capacitance values and, consequently, the resonant frequency, leading to a phase shift in the reflected waves. This ability to control the phase is crucial for applications like beam steering in antennas and manipulating the direction of the reflected beam.
To provide a more accurate equation for beam scanning in an array system based on the phase difference between unit cells, one can use the following equation:
where \(\theta \) is beam scanning angle, D is distance between adjacent unit cells and \(\Delta \Phi \) is phase difference. Therefore, the reflection phase of a unit cell for \(\Delta {Z}\) from 0 mm and 5.5 mm is simulated, serving as reflection functions. A linear polarization plane wave is excited to normally illuminate the proposed REMR unit cell. The direction of the incident electric field is in y-axis. The Floquet boundary is applied to simulate the infinite periodic structure. As depicted in Fig. 2b, when \(\Delta {Z}\) is 0, the unwrapped reflection phase measures 50\(^{\circ }\) at 5.5 GHz. Conversely, with \(\Delta {Z}\) at 5.5 mm, the unwrapped reflection phase amounts to -200\(^{\circ }\) at 5.5 GHz. Thus, the proposed REMR unit cell showcases a significant 250\(^{\circ }\) unwrapped phase difference at 5.5 GHz for \(\Delta {Z}\) ranging from 0 mm to 5.5 mm in the unit cell.
At normal incidence from 5 GHz to 7 GHz, the amplitudes and phases of the structure depicted in Fig. 1 are presented in Fig. 2a and b for the three distinct states characterized by variations in the actuator position, referred to as \(\Delta {Z}\) states. These states correspond to specific rotations of the actuator, which modify the equivalent capacitance of each unit cell in the structure. The reflection phase for these three \(\Delta {Z}\) states is illustrated in Fig. 2b. The reflection amplitude for each of these states ranges from 0 dB to -0.9 dB, indicating that efficient reflection control can be achieved using the proposed Reconfigurable Electro-Mechanical Reflectarray (REMR). Importantly, the S-parameters display a continuous behavior across the examined frequency range. The purpose of Fig. 2 is to elucidate the spatial phase-shifting mechanism that occurs when an incident wave interacts with the different actuator positions.

The reflection coefficient and phase behavior under normal and different angles of incidence. (a) Reflection coefficient (S11) for normal incidence as a function of frequency. (b) Unwrapped phase of the reflection coefficient for normal incidence as a function of frequency. (c) Reflection coefficient (S11) for oblique angles of incidence at 5.5 GHz. (d) Raw phase of the reflection coefficient for oblique angles of incidence at 5.5 GHz.
An actuator functions as a phase-tuning device by mechanically adjusting the position of the ground plane beneath the substrate, thus altering the effective path length and modifying the phase response of the signal. The phase shift is closely related to the separation distance \(\Delta {Z}\), which influences the k-vector of the propagating wave. However, when \(\Delta {Z}\) exceeds \(\frac{\lambda }{10}\), this expanded gap can introduce supplementary electrical losses due to increased impedance mismatch and dispersion effects. These losses may degrade the quality factor (Q factor), impacting overall system performance, particularly in high-frequency applications where precision is critical. While this mechanical tuning approach provides flexibility, it also poses challenges such as maintaining stability in the actuator mechanism and minimizing losses to optimize the phase response. In Fig. 2a, slight variations in capacitances of the grounded planes result in a magnitude variation from 0 dB to -0.9 dB. The heightened separation can lead to elevated resistance, subsequently resulting in greater ohmic losses. The value of \(\lambda \) is 54.5077 mm. For instance, when \(t_1 + \Delta {Z}\) is 1.5 mm, it corresponds to \(\frac{\lambda }{36.34}\). Similarly, for \(t_1 + \Delta {Z} = 3.5\) mm, it corresponds to \(\frac{\lambda }{15.57}\). In both cases, the S11 with loss remains below -0.2 dB. The variations lead to wideband and continuous phase reflections, as illustrated in Fig. 2b. The observed phase shift in reflections, caused by the movement of the ground plane up or down, is a direct consequence of the corresponding change in the gap capacitance (\(\Delta {Z}\)). This alteration affects the resonant frequency of the patch antenna and modifies the current distribution on the patch, ultimately influencing the reflection phase of the electromagnetic wave. By adjusting the \(\alpha \) angle and moving the actuator along the x-axis, as shown in Fig. 1b, precise control over the phase shift can be achieved.
The relationship between the presented theoretical framework and the empirical data shown in Fig. 2 is established through full-wave simulations. These simulations were conducted by varying the gap size \((\Delta {Z})\) between layers, demonstrating its impact on both the magnitude and phase of reflection coefficients across different frequencies centered around 5.5 GHz, as depicted in Fig. 2a, x b.
In Fig. 2c, the reflection coefficient (\(S_{11}\)) is shown for different angles of incidence at 5.5 GHz. As the angle of incidence increases, the reflection coefficient undergoes a slight variation due to the change in the effective electrical path length and impedance matching conditions. Higher incident angles introduce more significant deviations from the ideal reflection characteristics, but the system remains efficient in reflecting most of the incoming energy, maintaining low reflection losses across the range of angles.
Figure 2d demonstrates the raw phase of the reflection coefficient for the same varying angles of incidence at 5.5 GHz. The phase behavior shows a continuous shift with increasing incident angles, highlighting the system’s ability to maintain precise phase control even under oblique incidences. The phase variation is due to the angle-dependent wave propagation effects, which alter the reflection properties based on the electromagnetic wave interaction with the surface. This ensures robust phase control, which is crucial for applications such as beam steering and shaping.
The theoretical underpinnings for these observations are rooted in Eqs. (1) through (6), which provide a mathematical model for predicting these effects based on physical parameters such as layer thicknesses \((t_1)\), permittivity values \((\varepsilon _1\) and \(\varepsilon _2)\), and the gap size \((\Delta {Z})\). The results in Fig. 2 validate the theoretical framework by showing a clear correlation between the theoretical formulas and the simulated outcomes.

Schematic of the REMR system. (a) Interconnected components and blocks. (b) REMR component parts illustrated. (c) Side and full views of an REMR unit cell. (d) Flowchart illustrating the process for controlling ground plane movement through motor driver circuitry, phase shift adjustment, and system integration.

3D printed prototypes. (a) Chitubox software to slice the STL files. (b) Fabricated cam-shaped actuators and gears. (c) Combination with side holders and actuators.
Limitations of the REMR
While the REMR offers significant advancements in electromagnetic wave manipulation, it is essential to acknowledge its inherent limitations. One primary concern is the complexity involved in its mechanical components, which can lead to challenges in precision during manufacturing and assembly. This complexity also necessitates careful integration with electronic control systems, requiring additional design considerations to ensure seamless operation.
Another limitation lies in the response time of the electro-mechanical elements. While the system is designed for reconfigurability, the speed at which it can adjust may not meet the demands of all applications, particularly those requiring rapid, dynamic adjustments. Additionally, the reliability of mechanical components over extended periods is crucial; wear and fatigue could potentially impact performance and necessitate more frequent maintenance.
In Fig. 2, the analysis is conducted based on a single unit cell. Throughout the rest of the paper, the same phase shift is applied to each row of patches, as the entire structure follows a gradient arrangement for elevation beam steering. This method, based on a cam-shaped control mechanism, simplifies both the fabrication process and the control system. However, a limitation of this approach is the inability to independently control individual patches, as phase control is applied to the row as a whole.
Thermal management is another area of concern, as the heat generated by both mechanical and electronic components could affect the overall system performance. Addressing these limitations is vital for optimizing the effectiveness and longevity of the REMR in practical applications.
Results and discussions
Design and fabrication of REMR structure
The proposed device’s structure, as illustrated in Fig. 3, comprises a concatenation of 20\(\times \)21 identical reconfigurable unit cells. It should be noted that the number of electro-mechanical reconfigurable unit cells can be adjusted to form a REMR of the desired size and performance. The design of the underlying phase shifter plays a crucial role in the overall performance of the REMR. Fig. 3a presents different views of the REMR, highlighting its connection to an FPGA (Field Programmable Gate Array) through controlled motors. The gear shown is specifically designed for attachment to the motor, enabling precise adjustments of the phase shift. By assigning a specific value of \(\Delta {Z}\) to each column, a gradient arrangement is achieved, facilitating the desired beam steering capability. In Fig. 3b, a perspective view showcases the various components of the system. Specially designed side holders are utilized to accommodate both the actuators and moving ground planes, with the patch array being mounted on them. To assemble the complete stationary structure, these two components are positioned onto the bottom holder. Two springs are installed on each side to ensure proper positioning of the ground strip. Furthermore, the groove in the side holder plays a crucial role in maintaining the correct alignment of the actuator, strip, and springs, as depicted in Fig. 3c. The REMR unit cell consists of a patch on a substrate positioned above a ground plane that can move vertically. This movement changes the distance between the patch and the ground plane, altering the phase of the reflected signal. By controlling this movement, a pattern of phase shifts can be created to focus the reflected signal in a desired direction. Changing the parameter \(\Delta {Z}\) allows for adjustment of the phase shift and beam pattern. To control the movement of the ground plane, consider the following steps: (1) Choose a motor driver circuit compatible with the motor used for ground plane movement. (2) Connect the motor driver circuitry to the necessary control signals. (3) Develop the appropriate control signals to move the motor in the desired direction and speed. (4) Test the motor driver circuitry to ensure the motor moves correctly based on the control signals. (5) Integrate the motor driver circuitry into the overall system that controls the ground plane movement. The key is to carefully control the phase shift of the reflected signal by adjusting \(\Delta {Z}\) and to ensure the motor driver circuitry functions properly for moving the ground plane. Fig. 3d illustrates the flowchart for this process.
FPGA programming was not used to directly control beam steering in this design. A common approach in similar designs, control is achieved through independent motors and actuators beneath each unit cell. These actuators allow precise adjustments to the unit cells, enabling fine-tuned control of the beam direction. An FPGA-based control system could be integrated in future iterations to automate the beam steering process, providing real-time adjustment capabilities and enabling dynamic 3D beam steering.

Fabricated prototype of REMR. (a) Top view of a bar. (b) Fabricated movable ground planes covered by copper tape. (c) Finished assembly of REMR.
To create components (Fig. 3), STL files extracted from CST, containing crucial 3D geometry, are prepared for 3D printing. Specialized software slices the STL file for layer-by-layer construction. In Fig. 4, side holders and cam-shaped actuators are 3D printed. Due to substantial size, a modular approach divides each side holder into four parts. Corresponding STL files are sliced and printed independently, then assembled for the final functional component.
The STL file, containing vital 3D geometry, is generated using CST software and printed with a Phrozen Sonic Mighty 8K 3D printer (Fig. 4a). Chitubox software facilitates file transfer, managing files, and controlling the printer. For printing, Aqua Resin Gray 8K, known for high-resolution prints, is chosen, ensuring visually appealing and precise components. Due to the printer’s limited height, a strategic design splits the column structure into two sections (each 175 mm) with male and female rods for seamless connection. Figure 1b depicts cam-shaped actuators, produced and connected in two sections, forming the final column structure (Fig. 4c).
Efficient REMR phase shifting uses strategically placed actuators in side supports (Fig. 4c), allowing optimal control for dynamic reconfiguration and precise beam steering. Actuator movement influences column phase shifts, directly impacting the reflected beam’s orientation and trajectory, providing advanced control over the electromagnetic wavefront.
To seamlessly integrate ground plates into the REMR system, execute precise steps. Firstly, accurately cut wood material ( Fig. 5a) to specified dimensions in Fig. 1, emphasizing precision. Next, insert tabs on ground plates into corresponding slots within side holders Fig. 5b. Carefully position each ground strip for optimal functionality and alignment within the REMR system. Once ground planes are securely positioned, an essential process follows: applying a copper layer. This is crucial for proper conductivity, ensuring seamless signal propagation, and enhancing overall REMR system performance.Accurate cutting, precise positioning, and the use of copper tape for coating contribute to the successful incorporation of ground plates, ensuring optimal performance and efficient operation of the REMR system.
To fabricate the patch array, a precise 20\(\times \)21 array is designed on a Rogers RO4003C dielectric substrate with a thickness of 1.5 mm. The fabrication process involves employing acid etching techniques to selectively eliminate the copper layer from the substrate’s backside. Specifically, a copper solvent, such as ammonium persulfate, is utilized for this purpose, ensuring efficient removal of the unwanted copper material.
To verify the performance of the proposed REMR a prototype array of 20\(\times \)21 unit cells is fabricated to implement the periodic boundary condition of the phase shifters. The fabricated prototype is shown in Fig. 5c. The total size of the prototype is \(400 \times 441 \, {mm}^2\). To ensure robust fixation of the patch array, meticulous grooves are incorporated into the side holders. These grooves are thoughtfully designed to perfectly located the array, allowing for smooth insertion akin to a sliding model, as illustrated in Fig. 5c. This design consideration guarantees exceptional stability and precise alignment of the patch array within the REMR system, thus facilitating optimal performance and functionality.
Measurement
The experimental measurements to evaluate the performance of the REMR system are conducted using a spectrum analyzer and a pair of linearly polarized horn antennas. The horns, comprising a transmitter and a receiver, have been meticulously positioned. In the context of far-field measurements, the transmitter horn, connected to a signal generator, generates the incident wave and is capable of movement based on angles. The transmitter is consistently fixed at a distance of 1 meter from the center of the REMR structure, as illustrated in Fig. 6. The positioning ensures that both the incidence and reflection angles are maintained at \(\theta \).
The receiver horn, connected to a spectrum analyzer, captures the reflected beam from the REMR system. The spectrum analyzer plays a vital role in the experimental setup, as it is responsible for measuring and analyzing the power and frequency of the reflected signal. It provides critical insights into the performance characteristics of the REMR system by offering real-time data that can be used to evaluate the efficiency of the beam steering and reflection capabilities.
By employing the spectrum analyzer, we can assess the signal’s spectral components and determine the frequency response of the REMR system under different configurations. This information is essential for identifying any distortions or losses in the reflected signal, allowing for optimization of the design and performance of the REMR system. Additionally, the spectrum analyzer facilitates the calibration of the experimental setup, ensuring accurate measurements are obtained throughout the testing process.
Ultimately, the data collected from the spectrum analyzer not only aids in determining the far-field value but also serves as a fundamental parameter for assessing the overall effectiveness of the REMR system. The insights gained from this analysis contribute to the ongoing development and refinement of the technology, helping to establish benchmarks for future improvements.

Image of the measurement setup.The transmitter array is tuned for angles of incidence relative to the center of the REMR structure, which in this figure is set to \(\theta = -70^\circ \). The receiver horn is adjustable and can move based on the angle to effectively scan the reflected beam.

Gradient-related arrangements for radiation angles of \(\theta = 10^\circ \), \(\theta = -70^\circ \), and \(\theta = 30^\circ \).
Comparing measurement and simulation results
The discrepancies between the simulated and experimental results can be attributed to several factors. One possible reason is the inherent limitations of the simulation models, which may not fully capture the complexities of the physical system. Additionally, variations in the fabrication process of the unit cells could lead to differences in the phase shifts introduced by each cell, resulting in deviations from the expected performance. Environmental factors, such as temperature and humidity, could also impact the experimental results, causing further discrepancies. By systematically analyzing these factors, researchers can gain a deeper understanding of the underlying causes of the discrepancies and develop strategies to mitigate them, ultimately improving the accuracy and reliability of the REMR antenna design.
Beamsteering refers to the ability to control the direction in which an electromagnetic beam is propagated. In the context of a RR, beam steering involves manipulating the phase of the reflected signal to change the direction of the reflected beam. In the REMR, the incident electromagnetic wave interacts with the individual unit cells, which consist of metal patches, dielectric substrates, gap and ground plane. Each unit cell introduces a phase shift to the incident wave, and the cumulative effect of these phase shifts determines the direction of the reflected beam. By dynamically adjusting the phase shifts of the unit cells, beamsteering can be achieved. This is typically accomplished by introducing variable phase shifters or actuators within the unit cells. These actuators allow for controlled movement of the ground plane, altering the phase shift introduced by each unit cell. By controlling the phase shifts of the individual unit cells, the reflected beam can be steered in different directions. This enables the antenna to dynamically change its radiation pattern, directing the electromagnetic energy towards a desired target or adjusting the coverage area.

The normalized far-field patterns for the REMR at different horn angles. (a) \(\theta = 10^\circ \) based on the arrangement of sequence a in Table 2. (b) \(\theta = -70^\circ \) based on the arrangement of sequence a in Table 2. (c) \(\theta = 30^\circ \) based on the arrangement of sequence b in Table 2. (d) Time-Displacement \(\Delta {Z}\) Relationship in the Stepper Motor-Driven Cam Mechanism. (e) Additional image caption. (f–h) Represent the 3D beam scanning far-field patterns corresponding to (a–c), respectively. These 3D patterns demonstrate the design’s capability for complete 3D beam scanning.
The specific mechanism for beamsteering in a RR depends on the design and implementation of the unit cells and the actuation mechanism. By adjusting the position, orientation, or electrical properties of the unit cells, the phase shifts can be manipulated, resulting in beam steering effects. This allows for flexibility in controlling the direction, shape, and characteristics of the reflected beam. Beamsteering has numerous applications, including in wireless communication systems, radar systems, satellite communication, and antenna arrays. By dynamically controlling the beam direction, it is possible to optimize signal strength, improve coverage, achieve better signal quality, and enable adaptive communication systems that can adapt to changing environmental conditions or communication requirements.
A phase gradient along the REMR can be set to evaluate the REMR beam-steering capability. The performance of the proposed device is investigated in two different configurations to achieve the desired outcome, based on the analysis of experimental and simulation testing data. Fig. 7 illustrates the two analyzed configurations, where \(\theta \) in the yz-plane represents the horn angle in elevation degrees. An actuator, as depicted in Fig. 1b, is utilized to adjust both configurations. The effectiveness of these configurations in achieving the desired outcome is compared through the conducted analysis.
The determination of the sequences presented in Table 2, outlining the \(\Delta {Z}\) values for the investigation of beamsteering capabilities in our reconfigurable reflectarray, is rooted in the foundational concept of the spatial phase-shifting technique. The array, comprising 20\(\times \)21 unit cells, serves as the experimental platform for this study. Two distinct sequences of \(\Delta {Z}\) values are strategically employed, as illustrated in both Table 2 and Fig. 7.

Electric field distribution of the REMR at illuminating angle \(\theta = 0^\circ \) based on the arrangement of sequence a Table 2.
Each column in Fig. 7, denoted by a letter of the alphabet, corresponds to 20 unit cells, with each unit cell having a specific \(\Delta {Z}\) value determined based on the sequences outlined in Table 2. These sequences are not uniform, and their variation is intentional, aligning with the spatial phase-shifting technique employed in the reflectarray design. The non-uniformity is a deliberate choice, allowing for targeted exploration of the impact of varying gap sizes on beamsteering capabilities.
The rationale behind the selection of these non-uniform sequences is intricately connected to the proposed method for achieving the spatial phase-shifting technique. As outlined in Eqs. (1) and (2), this method involves adjusting the gap size \(\Delta {Z}\) through the actuation of the REMR. This actuation, fundamental to the operation of our REMR, is instrumental in manipulating the beam direction, characteristics, and radiation patterns.
In essence, the intentional non-uniformity in the sequences of \(\Delta {Z}\) values is a deliberate design choice, intricately tied to the spatial phase-shifting technique and the capability of the REMR to dynamically adjust its structure. This intentional variation allows for a nuanced exploration of beamsteering capabilities under different gap size conditions.
To assess the effectiveness of the gradient arrangements, both simulated and measured data are obtained. Through rigorous simulations and precise experimental measurements, the impact of varying \(\Delta {Z}\) values on the beamsteering performance of the reflectarray is evaluated. The REMR scattering beam patterns are presented in Fig. 8. Three sets of full wave numerical simulations and experimental measurements are performed to validate the REMR angular reciprocity. In the first set of experiments, conducted at 5.5 GHz, the incident wave is set at an angle of 10\(^{\circ }\), while the main reflected beam is observed at an angle of -70\(^{\circ }\), as illustrated in Fig. 8a. This configuration is achieved using the gradient phase shift arrangement based on the \(\Delta {Z}\) values shown in sequence (a) in Table 2. As can be seen, both the experimental and simulation lines follow a similar fluctuating pattern. However, the experimental line has more pronounced peaks and troughs compared to the simulation line. This suggests that the experimental setup may be more sensitive to certain variables, such as mechanical adjustments or environmental conditions, which are not fully accounted for in the simulation model.
In the subsequent set of experiments, the incident wave angle is adjusted to \(-70^{\circ }\), while the resulting main reflected beam is monitored at an angle of 15\(^{\circ }\), as demonstrated in Fig. 8b. This variation in the incident wave angle and the corresponding change in the reflected beam angle further highlight the beam steering capabilities of the REMR.
In the final set of simulations and measurements, the incident wave angle is precisely set to 30\(^{\circ }\), resulting in the observation of the main reflected beam at an angle of \(-70^{\circ }\), as depicted in Fig. 8c. This specific configuration is achieved by implementing the gradient phase shift arrangement based on the predetermined \(\Delta {Z}\) values illustrated in sequence (b) Table 2. In Fig. 8b and c the experimental data again shows more variability than the simulation data. The experimental line exhibits greater amplitude fluctuations, indicating potential discrepancies in the directional sensitivity of the antenna. These differences could be due to calibration errors in the experimental setup or simplifications made in the simulation model that do not accurately represent the real-world behavior of the antenna. Additionally, the 3D far-field patterns in Fig. 8f, g, and h provide a comprehensive visualization of the beam scanning capabilities, corresponding to the 2D patterns in Fig. 8a–c, respectively, illustrating the design’s full 3D beam steering potential.
In this design, an array of identical or uniform patches is employed, which can result in the generation of sidelobes. A highly efficient method for mitigating both sidelobes and grating lobes is the use of a nonuniform antenna array26,27. In previous studies, reflectarray antennas employing spatial phase shifting techniques have demonstrated the capability to maintain over 70% efficiency across a significant bandwidth, showcasing robust bandwidth performance27.
Figure 8d illustrates the relationship between time and displacement \(\Delta {Z}\) for the actuator mechanism driven by a stepper motor, showcasing the dynamic movement of the surface from 0 to 5.5 mm. The analysis is based on the Kuman for Arduino Professional 3D Printer CNC Kit Router Stepper Motor Nema 17 KB02 equipped with DRV8825 Stepper Motor Drivers, providing insights into the system’s performance and facilitating optimization for precise motion control applications. Average Speed of Displacement for Each column according to Table 2 from Sequence a to Sequence b is shown in Fig. 8e. These a steady increase in displacements over time without any fluctuations. This consistency suggests that the mechanical adjustments of the antenna elements are functioning as expected. However, the lack of fluctuations in the simulation data may indicate that the model does not fully capture the dynamic behavior of the system, leading to potential discrepancies when compared to the experimental results.
The 3D beam steering capability can be achieved by using small unit cells, each independently controlled by actuators such as motors or piezoelectric elements beneath them. This independent control allows for precise adjustment of each unit cell, enabling the desired 3D radiation pattern. Additionally, the design is compatible with IC and MEMS fabrication techniques, ensuring scalability and integration into compact devices.
The power capacity of the REMR antenna is analyzed. At a frequency of 5.5 GHz, the electric field distribution of the REMR is illustrated in Fig. 9. The maximum field strength reaches 2794 V/m. The calculation of the maximum field is performed as the REMR is illuminated by normal incidence, according to the arrangement outlined in Table 2.
The power handling capacity of the design is determined using the equation: \(P_{\text {max}} = P_{\text {in}} \left( \frac{E_{\text {b}}}{E_{\text {max}}}\right) ^2\) from28. Here, \(P_{\text {max}}\) represents the power handling capacity, \(P_{\text {in}}\) is the input power, \(E_{\text {b}}\) is the breakdown threshold value, and \(E_{\text {max}}\) is the maximum field strength.
For this figure, we used a waveguide port to calculate the power instead of a horn. When CST computes an E-field monitor, it provides all the amplitudes for a certain microwave power applied to the excitation port, which by default equals 0.5 W. Since the power is proportional to the amplitude squared, the E-field amplitude at any point of the model will increase as the square root of power. Therefore, by default, we have a reference power \(P_{\text {ref}} = 0.5 \, \text {W}\). To estimate the power handling capacity, we find the place in the structure with the highest E-field amplitude, \(E_{\text {ref}}\). For air, the dielectric strength is \(3 \times 10^6 \, \text {V/m}\). Thus, the highest power for the structure can be found from the ratio: \(\frac{P_{\text {max}}}{P_{\text {ref}}} = \frac{E_{\text {bd}}^2}{E_{\text {ref}}^2}\).
The calculated power handling capacity is: \(P_{\text {max}} = \left( \frac{200 \times 10^6}{2794}\right) ^2 \times 0.5 \, \text {W} = 25.670 \, \text {MW}\). This calculation is based on the substrate breakdown threshold of 200 MV/m, as indicated in29.
Table3. presents a comparative analysis of three existing technologies alongside the proposed Reconfigurable Electro-Mechanical Reflectarray (REMR) technology. Work 130 introduces a low-cost, mechanically phase-tunable reflectarray element created using 3D-printed open cylindrical shells, which achieves phase shifting through the rotation of dielectric shells. While it enables 1D beam steering, its phase-tuning range is limited, necessitating future enhancements for wider applications. Work 222 employs MEMS-based reflectarrays that utilize piezoelectric actuators for mechanical movements, allowing for beam scanning across large arrays. However, the speed of mechanical tuning is slower than electronic methods, and practical engineering challenges persist. Work 323 presents a Mechanically Reconfigurable Intelligent Surface (MRIS) designed for 5G communication, utilizing rotated unit cells for phase adjustment and demonstrating 1D beam scanning in indoor environments. The REMR technology builds on these existing works by integrating cam-shaped actuators for continuous mechanical phase shifts and achieving beam steering from 0\(^{\circ }\) to 70\(^{\circ }\) incidence angles. It showcases high power handling and consistent performance across a broad spectrum while addressing limitations found in conventional systems. This comprehensive comparison underscores the REMR technology’s potential to advance reconfigurable intelligent surfaces in telecommunications and other applications.
Conclusion
This paper presents a novel approach for achieving beam steering in reflecting-type array structures, specifically reflectarrays, through the utilization of Reconfigurable Electro-Mechanical Reflectarray (REMR) technology. The REMR design leverages mechanical movements of specific components within the structure to enable beam steering without the need for solid-state devices or integrated phase shifters, which is particularly beneficial for enhancing wireless applications. The experimental evaluations of a sub-6 GHz proof-of-concept prototype demonstrate the effectiveness of minor mechanical movements in steering the beam in desired elevation directions. The REMR structure maintains stability even in a powered-off state, incorporating a memory function for preserving the gradient states. Additionally, the fabrication process of the REMR is simplified using 3D printers, offering advantages such as flexibility, ease of customization, and cost efficiency.
One of the key advantages of the proposed REMR technology is its ability to offer low-loss and linear performance over a wider bandwidth, making it ideal for a variety of wireless communication applications. Furthermore, it can handle higher power levels, which is critical for robust performance in demanding environments. Unlike traditional approaches that rely on complex bias circuits and soldering components, the REMR eliminates the need for such intricate systems, reducing both cost and the potential for signal loss. This simplified approach also reduces manufacturing complexities, as no soldering of components is required, further lowering production costs and enhancing reliability. Additionally, the control circuits used in REMR are simple, making the technology more accessible and feasible for widespread implementation.
The proposed REMR technology holds great promise for enhancing wireless communications by providing customizable electromagnetic wave propagation channels. It offers an efficient solution for improving signal delivery, network performance, and user experience in various wireless applications, including 5G, IoT, smart cities, and smart indoor environments. By circumventing the requirement for intricate integrated components and addressing issues associated with angular dependence and manufacturing complexities in alternative RIS technologies, the REMR offers a pragmatic and feasible solution for nonhomogeneous surfaces. The REMR structure exhibits stable phase and amplitude responses for incidence waves and enables effective beam steering over a wide range of incidence angles.
In summary, the proposed REMR technology-with its innovative mechanical phase-shifting approach, low-loss wideband performance, high power-handling capability, simple fabrication process, and reduced complexity in control circuitry-offers a promising solution for practical applications requiring beam steering capabilities. The potential impact of REMR in enhancing wireless communication systems is significant, paving the way for advancements in signal control, network optimization, and improved user experiences in wireless environments .
Data availability
All data generated or analyzed during this study are included in this article.
References
Liang, J. C. et al. A filtering reconfigurable intelligent surface for interference-free wireless communications. Nat. Commun. 15, 3838. https://doi.org/10.1038/s41467-024-47865-6 (2024).
Wang, Z., Liu, Z., Shen, Y., Conti, A. & Win, M. Z. Location awareness in beyond 5G networks via reconfigurable intelligent surfaces. IEEE J. Sel. Areas Commun. 40(7), 2011–2025 (2022).
Yuan, Y. et al. Reaching the efficiency limit of arbitrary polarization transformation with non-orthogonal metasurfaces. Nat. Commun. 15, 6682 (2024).
Singh, G., Srivastava, A. & Bohara, V. A. Visible light and reconfigurable intelligent surfaces for beyond 5G V2X communication networks at road intersections. IEEE Trans. Veh. Technol.71(8), 8137-8151 (2021).
Amri, M. M., Tran, N. M. & Choi, K. W. Reconfigurable intelligent surface-aided wireless communications: Adaptive beamforming and experimental validations. IEEE Access 9, 147442–147457 (2021).
Cui, X. Y. & Tentzeris, M. M. Tile-based massively scalable MIMO and phased arrays for 5G/B5G-enabled smart skins and reconfigurable intelligent surfaces. Sci. Rep.12(1), 2741 (2022).
Qi, X., Li, F., Zhao, H., Xu, Z. & Li, H. Steerable simultaneous multibeam antenna based on reconfigurable reflectarray. IEEE Antennas Wirel. Propag. Lett. 22(8), 2037–2041. https://doi.org/10.1109/LAWP.2023.3273428 (2023).
Dajer, M. et al. Reconfigurable intelligent surface: Design the channel—A new opportunity for future wireless networks. Digit. Commun. Netw. 8(2), 87–104 (2022).
Ma, Q., Bai, G. D., Jing, H. B. et al. Smart metasurface with self-adaptively reprogrammable functions. Light Sci. Appl.8(1), 98 (2019).
Li, L., Shuang, Y., Ma, Q. et al. Intelligent metasurface imager and recognizer. Light Sci. Appl.8(1), 97 (2019).
Li, W. et al. Intelligent metasurface system for automatic tracking of moving targets and wireless communications based on computer vision. Nat. Commun. 14(1), 989 (2023).
Wu, Q. & Zhang, R. Towards smart and reconfigurable environment: Intelligent reflecting surface aided wireless network. IEEE Commun. Mag. 58(1), 106–112 (2020).
Alamzadeh, I. et al. A reconfigurable intelligent surface with integrated sensing capability. Sci. Rep. 11(1), 20737 (2021).
Sievenpiper, D. F., Schaffner, J. H., Song, H. J., Loo, R. Y. & Tangonan, G. Two-dimensional beam steering using an electrically tunable impedance surface. IEEE Trans. Antennas Propag. 51(10), 2713–2722 (2003).
Mias, C. Varactor-tunable frequency selective surface with resistive lumped element biasing grids. IEEE Microwave Wirel. Compon. Lett. 15, 570–572 (2005).
Chicherin, D., Sterner, M., Oberhammer, J. et al. Analog type millimeter wave phase shifters based on MEMS tunable high-impedance surface in rectangular metal waveguide. In IEEE International Microwave Symposium Digest. 61–64, Anaheim, CA, USA (2010).
Vassos, E., Churm, J., Powell, J. et al. Air-bridged Schottky diodes for dynamically tunable millimeter-wave metamaterial phase shifters. Sci. Rep.11(5988) (2021). https://doi.org/10.1038/s41598-021-85565-z.
Kittlaus, E. A., Eliyahu, D., Ganji, S. et al. A low-noise photonic heterodyne synthesizer and its application to millimeter-wave radar. Nat. Commun.12(4397) (2021). https://doi.org/10.1038/s41467-021-24637-0.
Molero, C. et al. Metamaterial-based reconfigurable intelligent surface: 3D meta-atoms controlled by graphene structures. IEEE Commun. Mag. 59(6), 42–48 (2021).
Zhang, W., Li, Y. & Zhang, Z. A reconfigurable reflectarray antenna with an 8 \(\mu \)m-thick layer of liquid crystal. IEEE Trans. Antennas Propag.70(4), 2770–2778 (2022).
Cai, L., Jiang, Z. H. & Hong, W. Evaluation of reconfigurable reflectarray antenna element at 19 GHz based on highly anisotropic liquid crystal material. In 2019 IEEE International Conference on Computational Electromagnetics (ICCEM), Shanghai, China. 1–3 (2019).
Momeni Hasan Abadi, S. M. A., Booske, J. H. & Behdad, N.MAcro-Electro-Mechanical Systems (MÆMS) based concept for microwave beam steering in reflectarray antennas. J. Appl. Phys.120(5), 054901 (2016).
Jeong, H., Park, E., Phon, R. & Lim, S. Mechatronic reconfigurable intelligent-surface-driven indoor fifth-generation wireless communication. Adv. Intell. Syst.4(3), 2200185 (2022). https://doi.org/10.1002/aisy.202200185.
Sievenpiper, D. High-Impedance Electromagnetic Surfaces, PhD Thesis, UCLA (1999).
Collin, R. E. Foundation for Microwave Engineering. 2nd Ed. (McGraw-Hill Inc., 1992).
Mandal, D., Singh, R. K. & Mishra, A. K. Non-uniform concentric circular antenna array design using IPSO technique for side lobe reduction. Proc. Technol. 6, 856–863 (2012).
Beiranvand, B., Iyer, A. K. & Mirzavand, R. Cost-effective design of a reflectarray antenna for 5G and millimeter-wave applications utilizing 3-D-printed components. IEEE Antennas Wirel. Propag. Lett. 23(3), 925–929. https://doi.org/10.1109/LAWP.2023.3338511 (2024).
Li, X., Zhou, Z., Wang, Q. & Zhang, J. A polarization conversion radome for high-power microwave applications. IEEE Antennas Wirel. Propag. Lett. 18(6), 1096–1099 (2019).
Hu, A., Konno, K. & Chen, Q. A 2-bit 3-D-printed reflectarray antenna using cylindrical rotation-based phase-tunable elements. IEEE Trans. Antennas Propag. 72(10), 7774–7782. https://doi.org/10.1109/TAP.2024.3451133 (2024).
Acknowledgements
The authors would like to thank Professor Iyer for actively participating in discussions related to this research. Additionally, appreciation goes to Ramin Khousravi for invaluable assistance in the fabrication and measurement processes.
Funding
This work was supported in part by the National Science and Engineering Research Council of Canada (NSERC); in part by the Alberta Innovates; and in part by the CMC Microsystems.
Author information
Authors and Affiliations
Contributions
Conceptualization: B.B., R.M. Methodology: B.B. Investigation: B.B. Project administration: R.M. Supervision: R.M. Writing-original draft: B.B. Writing-review. Editing: R.M., B.B.
Corresponding author
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Beiranvand, B., Mirzavand, R. Enhancing wireless applications through reconfigurable electro-mechanical reflectarray antenna design for beam steering. Sci Rep 14, 30140 (2024). https://doi.org/10.1038/s41598-024-81421-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-024-81421-y
