
Abstract
The current limiting control strategy of modular multilevel converters in flexible DC power grids can effectively reduce the requirements for line protection speed and the breaking capacity of DC circuit breakers (DCCB). However, it can easily lead to the interruption of power transmission at non-fault terminals and expanding the scope of the fault impact. Secondly, it did not consider the severity of matching faults, which may lead to excessive suppression of fault currents and reduce the sensitivity of the protection system. Therefore, this paper proposes an active current limiting control (ACLC) strategy with fault identification capability to further improve its selectivity and adaptability. Firstly, the starting element in the ACLC selectively identify fault areas based on the difference in the slope of the first backward traveling wave (TW) of the current. Secondly, a current limiting coefficient is constructed based on the slope of the first backward TW of current to achieve fault current limiting. On this basis, setting amplitude control to improve the adaptability of ACLC to fault resistance. Finally, a complete fault handling scheme was proposed, including ACLC, fault identification and fault isolation. The simulation results show that the proposed ACLC strategy is selective while reducing the technical requirements of DCCB. In addition, the adaptability of ACLC to fault resistance has also been improved.
Similar content being viewed by others
Introduction
The rational development and utilization of energy is the key to solving resource and environmental problems1. The flexible DC power grid has significant advantages in accepting renewable energy and is an inevitable trend for the future development of the power grid2. The fault current in a flexible DC transmission system increases rapidly, making it crucial to quickly detect and isolate the fault3. At present, high-voltage DC circuit breakers (DCCB) are commonly used for fault isolation in flexible DC power grids4. However, the high technical requirements for DCCB make it expensive and reduce the economic efficiency of the system5. Higher requirements have been put forward for the breaking capacity of DCCB in DC power grids based on half bridge MMC (HB-MMC). This led to significant challenges in the design of DCCB. Therefore, limiting fault current is one of the solutions to reduce DCCB costs6. In addition, limiting the fault current can also ensure the safety of the converter and reduce the requirement for quick fault identification7,8,9.
The current limiting scheme for fault current can be divided into two technical routes: improving equipment topology or improving MMC control. Improve equipment topology: Reference10 designs a resistive superconducting fault current limiter (SFCL) that can effectively suppress fault currents. Reference11 proposes an improved hybrid DCCB that can effectively reduce the voltage and current stress of DCCB during DC fault current interruption. In addition, some scholars have achieved current limiting by improving the MMC topology. Reference12 proposes a novel MMC topology that can block DC fault currents. Although the above technical approach can limit fault currents, it necessitates the addition of current-limiting devices or modifications to the DCCB and converter topology, which will reduce the economic efficiency of the power grid.
In contrast, active current limiting control (ACLC) achieved by changing the MMC control strategy is more economical. At present, ACLC based on MMC control is mainly achieved by reducing the DC voltage output by MMC. References13,14,15 propose a current-limiting coefficient based on fault current to adjust the number of submodules (SMs) during the fault period, thereby achieving fault current limitation. Reference16 develops a bypass ratio function based on bridge arm current for bypassing SMs to limit fault current and analyzes its adaptability in both strong and weak AC systems. References17,18 limit fault current by adjusting the MMC bridge arm voltage reference based on the fault current.
However, implementing a fault current suppression scheme based on changing the MMC control strategy has the following two issues. Firstly, regarding the startup issue of ACLC. Currently, ACLC primarily focuses on the fault current suppression effect, often overlooking the rationality of the startup conditions. ACLC mainly relies on detecting the current change rate and voltage drop as its starting conditions. References16,18 respectively detect the amplitude of DC current and MMC bridge arm current as the starting conditions for ACLC. However, due to the sensitivity of setting the startup threshold or the lack of consideration for factors such as noise, ACLC fails to meet its selectivity requirements, which adversely affects the system. Therefore, the selectivity of ACLC also needs to be further improved. Secondly, most parameter settings in ACLC currently do not consider matching with the severity of the fault. This may lead to excessive suppression of fault current, reducing the sensitivity of the protection system. Therefore, the adaptability of ACLC still needs further improvement.
In addition, the coordination between ACLC and fault recognition still needs further improvement. References19,20 analyze the impact of ACLC on fault traveling waves and propose corresponding protection principles. However, the concept of fault identification in protection can also be applied to provide valuable information for ACLC, helping to address its current issues.
Currently, the research on ACLC faces the following challenges:
-
At present, the electrical quantities used for fault identification and their discrimination results have not been fully utilized in ACLC.
-
At present, the ACLC strategy cannot meet its selectivity requirements and will expand the scope of fault influence, impacting the transmission power of non-fault terminals
-
At present, most ACLCs have not considered matching the severity of the fault, which reduces the sensitivity of the protection system.
The electrical quantities used in the ACLC proposed in13,15,21,22 are derived from DC lines. If the electrical quantities of the line can be effectively utilized to determine the fault area, the selectivity of ACLC can be improved. Reference21 proposes a staged ACLC based on this idea. However, there may be some issues with the coordination between ACLCs in different stages, and the suppression effect on fault current needs to be improved. On this basis, this article proposes an ACLC strategy. The proposed scheme has the following contributions:
-
Based on the idea of fault identification, the use of electrical quantities from the line has improved the selectivity and adaptability of the ACLC, and has formed a complete fault handling plan, while effectively reducing the technical requirements for the DCCB.
-
Fully utilize the single ended electrical quantities of the line to identify the fault area and use it as the starting criterion for ACLC, improving the selectivity of ACLC.
-
Construct current limiting coefficient based on single ended electrical quantities information of the line, and set variable limiting amplitude control to adapt to higher fault resistance.
The rest of the paper is structured as follows. In section "The overall idea of ACLC strategy", the relationship between ACLC current limiting effect and startup time was explained, and the implementation approach of ACLC was presented. In section “ACLC starting element design”, the first backward TW of current of different fault areas was analyzed, and an overall ACLC was constructed. In section “The principle of ACLC”, the impact of ACLC on AC side current and MMC bridge arm current was explained, the time window for ACLC start criterion was specified, and ACLC startup threshold and control parameters were set. In section “Discussion on ACLC related issues”, the fault current suppression effect of ACLC, its coordination with DCCB, as well as its selectivity and adaptability were verified.
The overall idea of ACLC strategy
ACLC in flexible DC power grid should selectively avoid expanding the scope of fault impact. Secondly, ACLC also needs to respond quickly after a fault to reduce the fault current. Therefore, ACLC needs to balance selectivity and speed. The start time of ACLC after a fault is directly related to the limiting effect of fault current. Assuming ACLC is started at time t1 and t2 respectively, Fig. 1 shows the dynamic changes in DC side current.

Illustration of the DC side current of the ACLC after startup at different times.
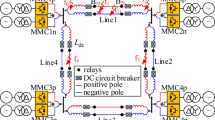
According to Fig. 1, the peak breaking current of DCCB is closely related to the fault isolation time and start-up time. In order to reduce DCCB costs and shorten fault isolation time, ACLC needs to be started as early as possible. Therefore, using the single ended electrical quantities of the line to identify fault areas as the starting criterion for ACLC can improve selectivity while meeting the requirement of rapidity. The method for obtaining of electrical quantities of lines in ACLC is shown in Fig. 213. In Fig. 2, Uline and Iline represent the voltage and current measured at the installation site of the line protection.

Measurement method of electrical quantities of lines in ACLC.
Secondly, this paper takes the half bridge MMC as the research object. During the fault process, the suppression of fault current is achieved by multiplying the MMC bridge arm voltage reference value by KM18. Considering that in a weak AC system, in order to ensure that the wind turbines remains connected to the grid, the AC side voltage cannot be lower than 0.2 p.u., therefore the KM range value is [0.2, 1]16, and the ACLC strategy principle is shown in Fig. 3.

ACLC principle diagram.
In Fig. 3, Upj* and Unj* represent the reference voltages of the upper and lower bridge arms of the MMC. During the fault period, the coefficient KM is used to reduce Upj* and Unj*, thereby changing the number of SMs input by MMC during the fault period and achieving the limitation of fault current.
The overall ACLC scheme timing diagram is shown in Fig. 4. In Fig. 4, t0 is the time when the fault occurred. ts is the ACLC startup time. tb is the fault isolation time.

The overall ACLC scheme timing diagram.
ACLC starting element design
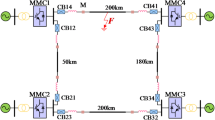
Four terminal MMC-HVDC grid is adopted as the study case in this paper, which the topology is shown in Fig. 5. In Fig. 5, f0, f1, and f2 are situated at 20 km, 100 km, and 180 km, respectively, along Line1. According to the principle of selectivity, only the MMC of the two terminals of the faulty line starts ACLC. Taking the ACLC startup of MMC1 as an example, as shown in area A of Fig. 5.

Schematic diagram of the startup range of ACLC for MMC1.
Based on the above content, fully utilizing the electrical quantities of the line to identify fault areas can improve the selectivity of ACLC. Secondly, ACLC must also satisfy the speed requirement. Therefore, fault traveling waves (TW) can be utilized to meet the requirements of selectivity and speed mentioned above. The analysis of TW at different fault locations is as follows.
Internal faults
In case of a positive pole-to-ground (P-PTG) fault, the characteristics of the first backward traveling wave of the current were analyzed. After a transmission line fault, there will be coupling between the positive and negative lines, which can be eliminated by Eq. (1).
where Fp and Fn respectively represent the voltage or current at the positive and negative pole. F1 and F0 respectively represent the 1-mode fault component and 0-mode fault component of voltage or current. Due to the stability of the 1-mode component, this paper analyzes it using the 1-mode component. The propagation process of traveling waves along transmission lines can be represented by (2).
where l is the transmission distance of the TW in the line. e-sl/V1 represents the time delay of TW propagation in the line. k and τ respectively represent the amplitude attenuation effect and distortion effect of TW per unit length.
In case of measurement point RM1, the characteristics of the first backward traveling wave of the current were analyzed. Unless otherwise specified in this paper, backward TW represents the first backward TW of current. When the fault occurs at f2 and the time delay is ignored, the complex frequency domain expression of TW at RM1 is shown in (3).
where l1 represents the distance from fault point f2 to RM1. Udc is the voltage at the fault point during normal system operation. ZC0 and ZC1 represent the 0-mode and 1-mode impedances of the DC line, respectively. The representation of Ib (s) in the time domain can be obtained through the Laplace inverse transform, as shown in (5).
According to (5), the waveform Ib(t) can be obtained as shown in Fig. 6.

Backward TW at f2 fault.
As shown in Fig. 6, when a fault occurs within the line, the waveform of TW is very steep. In the case of an internal fault, the traveling wave only undergoes the attenuation effect of the line, so its waveform change is not significant.
External faults
The equivalent circuit of f3 fault is shown in Fig. 7.

f3 fault equivalent circuit.
In Fig. 7, IF1 is the 1-mode fault traveling wave generated at the fault location. At this point, the complex frequency domain expression of TW at RM1 is shown in (6).
where L1 represents the length of the DC line Line 1. The representation of Ib (s) in the time domain can be obtained through the Laplace inverse transform, as shown in (7).
According to (7), the waveform Ib(t) can be obtained as shown in Fig. 8.

Backward TW at f3 fault.
As shown in Fig. 8, in the case of an external fault, the CLR will significantly attenuate the traveling wave, resulting in a smoother waveform. Based on the above analysis, there is a significant difference in the traveling wave (TW) waveform between internal and external faults. This characteristic can be used as a starting criterion for ACLC. To further amplify the difference in the traveling wave (TW), its slope is calculated. Therefore, the ACLC start criterion is shown in (9).
where kib is the slope of Ib(t). TS represents the sampling time interval of TW. k corresponds to a sampling point in the number of TW sampling points, where the first sampling point in TW corresponds to k = 1. kIbset is the start criterion threshold for ACLC, and its setting rules and values will be introduced in Sect. 5.
In addition, to prevent the coupling between the positive and negative poles from causing the MMC to mistakenly start ACLC, a pole selection criterion, as shown in Eq. (10), is defined.
where M is the selection factor. Mset is the pole selection setting value, which is set to 1.5 in this article. Δip and Δin are the positive and negative current fault components of the line measurement points.
The principle of ACLC
Construction of current limiting coefficient
Based on the above analysis, it can be concluded that the slope of the backward TW changes with the fault location. The backward TW can reflect the severity of the fault, and the KM of ACLC can be constructed based on this characteristic. The maximum value of |kib(t)| within the limited current startup range is kIbmax, and the minimum value is kIbset. When |kib(t)| reaches its maximum value, it indicates that the most serious fault has occurred in the area, and the KM value should be set to the minimum value Kmin. When |kib(t)| reaches its minimum value, it indicates that the slightest fault has occurred in the area, and the KM value should be set to its maximum, 1. Therefore, according to the idea of normalization, KM is shown in (12).
The default Kmin is 0.2, which can be substituted to obtain
According to (13), the number of SMs will be adjusted based on |kib(t)| after a fault occurs. But although the fault resistance will reduce the value of |kib(t)|, it will still make the KM value smaller. This will result in over suppression of fault current and reduce the sensitivity of the protection system. In case of a PTG fault occurring at the midpoint of the line through a 200 Ω fault resistor, the DC side current before and after current limiting is shown in Fig. 9.

DC side current under fault conditions with fault resistance.
According to Fig. 9, in the presence of fault resistance, ACLC will suppress the fault current and further weaken the fault characteristics. This is not conducive to identifying faults in the protection system. Therefore, ACLC needs to consider the handling plan for fault conditions with fault resistance.
ACLC variable amplitude control
In order to improve the adaptability of ACLC, KM variable limit amplitude control is set up. When a fault occurs through a fault resistor, if ACLC cannot adapt to the fault resistor, it will further reduce the fault characteristics and affect the fault identification of the line. In addition, it is necessary to ensure the suppression effect of current under metallic faults. Therefore, klimit is set as the switching condition for the limit amplitude. klimit is the slope of the backward TW when there is a metallic fault at the end of the line, and a certain threshold is taken. Compare |kib(t)| with klimit. When |kib(t)| is greater than klimit, it is considered that a metallic fault has occurred in the line, Kmin = 0.2. When |kib(t)| is less than klimit, it is considered that the line has faulted through a fault resistance, Kmin = Umin/Udcn. Umin is the lowest voltage of the line. Udcn is the rated voltage. ACLC’s variable amplitude control adjusts the lower limit of KM based on the voltage at the fault point, enhancing its adaptability to fault resistance. The control schematic diagram of ACLC is shown in Fig. 10. The parameter settings can be found in section “Discussion on ACLC related issues”.

The ACLC control schematic diagram.
The fault conditions are the same as above. After ACLC adopts variable limit amplitude control, its DC side current is shown in Fig. 11.

DC side current under variable limit amplitude control.
According to Fig. 11, the suppression of fault current is weakened under the variable limit amplitude control. Therefore, setting variable limit amplitude control can improve the adaptability of ACLC to fault resistance.
Performance characteristics of ACLC
After the DC side fault of the system, the equivalent diagram of the fault circuit is shown in Fig. 12. where Larm, Rarm, and Carm respectively represent the inductance, resistance and capacitance of the bridge arm in the MMC. Leq1, Req1, and Ceq1 represent the equivalent inductance, resistance, and capacitance of the fault circuit. Udc is the total capacitance–voltage of the SMs.

Equivalent circuit diagram of DC side fault.
Then Leq1, Req1, and Ceq1 are shown in (14).
Due to the short discharge time and minimal voltage variation of capacitors, Udc can be considered as a constant voltage source9. According to Fig. 12 and Kirchhoff’s voltage law, Eq. (15) can be obtained.
The fault occurred at t0 and the DC side current before the fault was Idc. According to (15), the expression for fault current can be obtained as shown in (16).
After ACLC, Udc decreased by KM times, as shown in (17).
The ACLC startup time is ts. According to (15) and (17), the expression for the fault current after ACLC can be obtained, as shown in (18).
Assuming fault time t0 = 0ms and ACLC startup time ts = 1 ms. According to (16) and (18), the waveform of the DC side current after ACLC can be obtained as shown in Fig. 13.

The DC side fault current after ACLC.
As shown in Fig. 13, the mapping relationship between ACLC and fault current basically conforms to (18). In addition, it can be seen from Fig. 13 that ACLC can effectively suppress fault current after startup.
Discussion on ACLC related issues
AC side current and MMC bridge arm current
Reference21 provides a detailed analysis of the impact of ACLC on the AC side current and bridge arm current. The analysis results indicate that the AC current after ACLC is related to the AC side voltage of MMC. When reducing the inserted SMs through ACLC, it may cause overcurrent on the bridge arms of MMC. Therefore, it is necessary to suppress it to ensure the safety of MMC. Through analysis of the current inner loop control, it is known that it weakens the damping effect and accelerates the system’s response speed, resulting in overcurrent in the MMC bridge arm15. Therefore, in the d-axis current inner loop, the purpose of suppressing the bridge arm current can be achieved by adding a first-order low-pass filter15. When ACLC is started, the low-pass filter is connected in series to the d-axis current inner loop control. The control block diagram is shown in Fig. 14

Bridge arm current suppression control of MMC.
In Fig. 14, Td is the time constant of the low-pass filter. When a fault occurs at the local end of the line, switch to inner loop control, and the bridge arm current of MMC is shown in Fig. 15.

Maximum bridge arm current of MMC.
As shown in Fig. 15, switching the d-axis current inner loop control after a fault can to some extent suppress the bridge arm current and prolong the MMC block time.
Time window for start criterion
This paper uses backward TW as the starting criterion for ACLC, therefore it is necessary to meet the relevant time constraints of backward TW. The wavelet transform modulus maxima (WTMM) is used to find out singular point and calibrate the arrival time of the fault traveling wave. It is necessary to ensure that the time window only includes the backward TW, with the first arrival time of the backward TW being t1 and the second arrival time being t2. TW arrival marker as shown in Fig. 16. Secondly, considering that ACLC should be started as early as possible, a time window of 0.5 ms should be selected. Therefore, the time window T1 for the start criterion of ACLC is shown in (18).

The overall flow chart of ACLC scheme.
To ensure the integrity of obtaining backward TW, retain the TW data before t1 0.1 ms for computation. The fault pole selection criteria time window is also the same.
ACLC strategy flow chart
The overall flow chart of ACLC scheme proposed in this paper shown in Fig. 17.

The overall flow chart of ACLC scheme.
When a fault occurs and the DC current is greater than 1.1 times the rated DC current or the DC voltage is less than 0.9 times the rated DC voltage, MMC enters the start judgment of ACLC strategy. Calculate and determine whether there is a fault in the line connected to this MMC according to (11). When it is determined that there is a fault in the line connected to this MMC, continue ACLC startup determination. Determine whether ACLC is started according to (9), and after starting, reduce the bridge arm reference voltage of MMC to KM times. At the same time, a low-pass filter is connected in series to the d-axis current inner loop to limit the AC side current and the bridge arm current of the MMC. Simultaneously, the DCCB actions at both ends of the fault line isolate the fault. Finally, determine whether the fault current is less than 0.5 times the fault current to achieve the exit of ACLC. MMC returns to normal control mode after ACLC exits.
Determination of thresholds and control parameter settings
Thresholds for ACLC with PTG fault
Due to the difference in backward TW amplitude between pole-to-ground (PTG) faults and pole-to-pole (PTP) faults. Therefore, it is necessary to separately set the kIbset for PTG and PTP faults to ensure their reliability. System parameters are shown in Table 1. According to (9), the kib(t) under PTG fault can be obtained, as shown in Fig. 18.

The kib(t) of PTG faults at different locations.
The setting of ACLC startup threshold needs to consider the kib(t) when the most severe fault occurs outside the line, and multiply it by the reliability coefficient Krel. According to Fig. 18, the |kib(t) at the most severe fault outside the line is 2029 (kA/s), and Krel is taken as 1.5. Therefore, the startup threshold kibset1 of ACLC for PTG failure is 3043 (kA/s).
Thresholds for ACLC with PTP fault
According to (4), (5), and (7), and specific system parameters, the Ib (t) under PTP fault can be obtained as shown in Fig. 19. According to (9), the kib(t) under PTP fault can be obtained, as shown in Fig. 20. The principle of setting ACLC startup threshold under PTP fault is the same as above. According to Fig. 19, the |kib(t) at the most severe fault outside the line is 4540 (kA/s), and Krel is taken as 1.5. Therefore, the startup threshold kibset2 of ACLC for PTP failure is 6810 (kA/s).

The Ib(t) of PTP faults at different locations.

The kib(t) of PTP faults at different locations.
Control parameter settings
Taking PTG malfunction as an example, the most serious fault is usually the local end of the line, the fault distance of 20 km. According to (5) and (9), the slope of backward TW can be obtained as shown in Fig. 21. According to Fig. 21, the kIbmax1 is 15,943 (kA/s). Due to the difference in kib(t) between PTG faults and PTP faults, kIbmax is set separately to ensure its effectiveness. The analysis method and parameter selection are the same as above. Under PTP fault, kIbmax2 is 35,786 (kA/s).

The kib(t) of P-PTG faults at f0.
klimit is the slope of the backward TW when there is a fault at the end of the line and take a certain margin. Taking PTG malfunction as an example. According to (5) and (9), the slope of backward TW can be obtained as shown in Fig. 22. The fault distance of L1.

The kib(t) of P-PTG faults at f2.
According to Fig. 22, the |kib(t)| at the end of the line is 14,050 (kA/s). Consider a certain margin, with a margin coefficient of 0.8, klimit1 is 11,240 (kA/s). Due to the difference in kib(t) between PTG faults and PTP faults, kIbmax is set separately to ensure its effectiveness. The analysis method and parameter selection are the same as above. Under PTP fault, klimit2 is 26,043 (kA/s).
Simulation and verification
To verify the effectiveness of the ACLC proposed in this paper, a true bipolar ± 500kV four terminal DC power grid was built on the PSCAD simulation platform as shown in Fig. 5. MMC4 is controlled by constant DC voltage, while other MMCs are controlled by constant DC power. MMC adopts a half bridge SM topology, and the specific parameters of the flexible DC grid and MMC are shown in Table 1. The transmission line is an overhead line and is a frequency dependent model, as shown in Fig. 23. The system failure time is 1 s.

DC lines model.
ACLC effect verification
ACLC trigger verification
In case of metal faults occurring at different positions, take measurement point RM1 as an example to verify whether MMC1 can correctly start ACLC. In case of PTG and PTP faults occurring at points f2, f3, and f4, the |kib(t)| values are shown in Figs. 24 and 25. When the fault occurs at different locations, whether MMC1 starts ACLC are shown in Table 2.

|kib(t)| under P-PTG fault.

|kib(t)| under PTP fault.
As shown in Figs. 24, 25 and Table 2, ACLC can be accurately start under metal faults, improving the selectivity of ACLC. According to Table 2, the value of |kib(t)| will also change when the fault location is different. The verification confirms that |kib(t)| can sensitively reflect the severity of faults, demonstrating its feasibility for constructing ACLC. It should be noted that there is a fault with f6, and based solely on the information from measurement point RM1, MMC1 does not start ACLC. However, the final result of ACLC startup also needs to be based on the information from measurement point RM2. Due to the symmetry of the system, if the start result of ACLC can be correctly determined based on the information of measurement point RM1, then the other measurement points can also be correctly determined. Therefore, the verification of the remaining measurement points will not be repeated.
Verification of ACLC fault current suppression effect
Set metal fault at the midpoint f1 of the line and compare its current limiting effect with ACLC proposed in13,18. In order to observe the trend of fault current changes more intuitively, the DCCB remained closed during the fault period. The DC side current measured at RM1 are shown in Figs. 26 and 27.

DC side current under PTG fault.

DC side current under PTP fault.
Considering that the fault identification time is 3 ms and the DCCB disconnection time is 4 ms, the main focus is on comparing the current changes 7 ms after the fault. Reference13 uses the current change rate as the criterion for starting ACLC, and constructs a current limiting coefficient based on the current amplitude and current change rate to reduce SMs input during faults. However, due to the use of current change rate as the starting criterion for ACLC, its anti-noise ability needs further verification. Secondly, fluctuations in current change rate can lead to unstable current limiting coefficient, which may affect its current limiting effect. Therefore, compared with before ACLC, under the action of ACLC in13, the current amplitude decreased by 34.19% 7 ms after the fault occurred, as shown in Fig. 26. Reference18 uses current amplitude as the criterion for starting ACLC, and constructs a current limiting coefficient based on the current amplitude to reduce SM input during faults. Therefore, compared with before ACLC, under the action of ACLC in18, the current amplitude decreased by 41.88% 7 ms after the fault occurred, as shown in Fig. 26. However, the starting threshold of this ACLC is the rated value of the DC current, which will expand the range of fault impact. The ACLC proposed in this paper not only ensures selectivity, but also improves its current limiting effect. Compared to before ACLC, the current amplitude decreased by 53.53%.
Under PTP fault, both positive and negative MMC start ACLC to suppress fault current. References13,18 and the ACLC proposed in this paper reduced the fault current by 49.61%, 66.12%, and 56.84%, respectively, as shown in Fig. 27. In addition, it can be inferred that the ACLC proposed in this paper can handle different types of faults.
Verification of cooperation with DCCB
Set the PTG fault at point f0 to verify the coordination between the proposed ACLC and DCCB. DCCB is a hybrid topology structure. The amplitude variation of the current flowing through CB12 and the energy absorption variation of the lightning arrester are shown in Figs. 28 and 29.

DC side current.

Energy absorption of lightning arrester.
In Fig. 28, it is evident that compared to before ACLC, the peak fault current during DCCB breaking has decreased by 51.6%, and the fault clearing time has reduced by 2.1 ms. As shown in Fig. 29, compared with before ACLC, the energy absorption of the lightning arrester is reduced by 84.15%. In summary, the combination of ACLC and DCCB proposed in this paper can reduce the peak breaking current and accelerate the fault isolation time. To a certain extent, it reduces the technical requirements of the DC power grid for DCCB and improves the economy of the DC power grid.
Adaptability verification of ACLC under different fault conditions
Fault resistance
Set PTG faults at point f1, with fault resistances of 100 Ω, 200 Ω, and 300 Ω respectively. The calculated results for |kub(t)| is shown in Fig. 30.

|kib(t)| at different fault resistances at f1 fault.
As shown in Fig. 30, the fault resistance reduces the amplitude of |kib(t)|, but it does not affect the startup of the ACLC. Additionally, a PTG fault is set at f0, f1, and f2 point, with fault resistances of 100, 200, and 300 Ω, respectively. The simulation results of |kub(t)| and ACLC start results are shown in Table 3.
According to Table 3, ACLC still recognizes the fault area and starts correctly under a fault resistance of 300 Ω.
To verify the effectiveness of ACLC under low resistance faults, PTG faults at line midpoint, with fault resistances of 25 Ω, 50 Ω, and 75 Ω respectively. The current limiting coefficient and DC side current are shown in Figs. 31 and 32.

KM at low fault resistances.

DC side current at high fault resistances.
As shown in Figs. 31 and 32, under low-impedance faults, the ACLC proposed in this paper increases the current-limiting coefficient as the transition resistance rises, leading to a weakened current-limiting effect. However, when the fault resistance is relatively small, it still provides certain limitations on the fault current, facilitating faster fault isolation in conjunction with the DCCB.
To verify the effectiveness of ACLC under high resistance faults, PTG faults at line midpoint, with fault resistances of 100 Ω, 200 Ω, and 300 Ω respectively. The KM is shown in Fig. 33 and the DC side current before and after ACLC is shown in Fig. 34.

KM at different fault resistances.

DC side current at different fault resistances.
As shown in Fig. 33, with the increase of fault resistance, the KM coefficient gradually increases and the current limiting effect weakens. It can be inferred that the proposed ACLC will not excessively suppress fault current under high resistance faults, as shown in Fig. 34. This enhances the adaptability of the ACLC to fault resistance, preventing any significant impact on the sensitivity of the line protection system.
Noise
In order to verify the proposed ACLC adaptability to noise, the PTP fault is set at f3 point and Gaussian white noise with signal-to-noise (SNR) ratios of 50 dB and 40 dB is added to the sampled data. The calculation result of |kib (t)| is shown in Fig. 35.

|kib(t)| at different SNR at f3 fault.
Additionally, a PTP fault is set at f0, f1, and f2 and add Gaussian white noise with SNR of 50 dB and 40 dB to the sampled signal. The simulation results of |kib(t)| and ACLC trigger results are shown in Table 4.
According to Fig. 35 and Table 4, noise can cause changes in the value of |kib(t)|, but it does not affect the discrimination results of ACLC. When the SNR is 40 dB, ACLC can still identify the fault area and start ACLC.
In case of the PTP fault at f1, the KM and DC side currents at different SNR levels are shown in Figs. 36 and 37.

KM at different SNR.

DC side current at different SNR.
According to Fig. 36, noise will have a certain impact on the KM value, but the impact is relatively small. Therefore, the impact of noise on the fault current limiting effect is relatively small, as shown in Fig. 37. In summary, the ACLC proposed in this paper has a certain adaptability to noise and can still selectively start and limit fault current even with an SNR of 40dB.
MMC capacitor voltage
Taking the metal fault at the midpoint of the line as an example, the capacitor voltage and total voltage of the SMs with and without ACLC after the fault are shown in Fig. 38.

The capacitor voltage and total voltage of the SMs with and without ACLC.
As shown in Fig. 38, the voltage of the submodule capacitor drops instantly when the ACLC is not applied, releasing energy to the fault point and thus causing a large fault current. ACLC will change the working state of SMs. For the upper bridge arm, there are more SMs in the excised state. The removed SM is not into the circuit, and when most SMs are in the cut-off state after the ACLC, the capacitance of the SMs remains essentially unchanged, as shown in Fig. 38a. For the down bridge arm, there are more SMs in the engaged state. The SMs in the engaged state have two working modes: charging and discharging, with the specific mode determined by the direction of the bridge arm current. At this point, the direction of the bridge arm current causes more of the down bridge arm SMs to be in the charging state. As a result, the capacitor voltage of the SMs increases, as shown in Fig. 38b.
AC side current
Set a metallic PTG fault at f0, and the AC side current is shown in Fig. 39.

AC side current.
According to Fig. 39, the AC side current during without ACLC is [3.17 pu, − 3.02 pu], and after ACLC, the AC side current increases to [4.94 pu, − 4.74 pu]. Therefore, it can be concluded that ACLC will affect the AC side current, which is consistent with the above analysis. After switching the d-axis current inner loop control, the AC side current is limited to [4.28 pu, − 3.76 pu], which reduces the impact on the AC side current to a certain extent. Although ACLC may cause overcurrent on the AC side, it does not lead to mis-operation of the AC side protection. Because the DC side fault isolation time is shorter than the AC side22.
Bridge arm current of MMC
Set a metallic PTG fault at f0, and the bridge arm current of MMC is shown in Fig. 40.

MMC bridge arm current.
As shown in Fig. 40, activating the current inner loop control helps suppress the MMC bridge arm current, keeping it below the MMC block value during faults. This ensures the safety of the MMC and reduces the speed requirements for line protection.
MMC bridge arm voltage
The analysis of the examples in the text can be divided into three categories: metallic faults, presence of fault resistance, and presence of noise. Taking the upper bridge arm of MMC as an example, the following is an analysis of the bridge arm voltage under three different fault conditions.
Metallic fault
Set metal fault at the midpoint of the line. In order to observe the trend of bridge arm voltage more intuitively, the DCCB remained closed during the fault period. The reference voltage and actual voltage of the MMC bridge arm when ACLC is not triggered after the fault are shown in Fig. 41a. After the fault triggers ACLC, the reference voltage and actual voltage of the MMC bridge arm are shown in Fig. 41b.

Bridge arm voltage under metallic fault.
According to Fig. 41a It can be seen that there was no significant change in the bridge arm voltage before and after the fault. Therefore, during the fault period, the SMs will continue to input, resulting in an increase in fault current. According to Fig. 41b It can be seen that ACLC will lower the bridge arm reference voltage of MMC, and modulation triggering will reduce the number of SMs. The actual voltage of the bridge arm decreases accordingly, reducing the fault current.
Fault resistance
Set PTG faults at the midpoint of the line, with fault resistances of 100 Ω and 300 Ω respectively. The reference voltage and actual voltage of the MMC bridge arm are shown in Fig. 42.

Bridge arm voltage under fault resistances.
As shown in Fig. 41, when there is a fault resistance, the reference voltage of the bridge arm will hardly change. It will not further weaken the fault characteristics and affect the protection system. This further illustrates the adaptability of ACLC to fault resistance.
Noise
Set PTP faults at the midpoint of the line, and Gaussian white noise with SNR ratios of 50 dB and 40 dB is added to the sampled data. The reference voltage and actual voltage of the MMC bridge arm are shown in Fig. 43.

Bridge arm voltage under fault resistances.
From Fig. 43, it can be seen that noise hardly affects the bridge arm reference voltage. Therefore, noise will not affect the fault current suppression effect.
DC bus voltage
A metallic PTG fault is set at the midpoint of Line 3, and the dynamic changes in DC bus voltage before and after the fault are shown in Fig. 44.

The dynamic changes in DC bus voltage.
According to Fig. 44, after the fault occurs, the MMC at both ends of the faulty line starts ACLC to reduce the MMC voltage and suppress the fault current. After fault isolation, each MMC will experience overvoltage, but the overvoltage phenomenon of MMC that starts ACLC is more obvious, with a maximum of 1.25 pu. Compared to the overvoltage generated before ACLC, it is within an acceptable range. Secondly, there will be some fluctuations in the voltage of MMC that has not started ACLC, but voltage will eventually stabilize.
Comparison with existing current limiting control strategies
This section compares the ACLC proposed in this article with existing current limiting control strategies, as shown in Table 5.
According to Table 5, compared to the existing ACLC, the ACLC proposed in this paper reasonably sets the startup criteria, which improves its selectivity. To avoid the impact of ACLC on power transmission at non-faulty ends and expand the scope of faults. Secondly, the current limiting start-up criteria and parameters in this article are not dependent on simulation and have a certain theoretical basis. In addition, this paper also considers the influence of fault resistance and noise on the current limiting starting criterion and the current limiting effect. Simulation results show that both have certain adaptability.
Conclusion
This paper proposes an ACLC for flexible DC power grids, which improves the selectivity and adaptability of ACLC and the conclusions are as follows.
-
This paper determines the fault area based on backward TW and uses it as the starting criterion for ACLC, which has selectivity, certain ability to withstand fault resistance and noise. The setting of the startup threshold does not depend on simulation. It can avoid the problem of MMC’s ACLC strategy affecting power transmission at non faulty ends and expanding the scope of fault impact.
-
The ACLC proposed in this paper is constructed based on the slope of backward TW and equipped with variable amplitude control to improve its adaptability. ACLC parameter selection does not depend on simulation. Secondly, switching the current inner loop control suppresses the MMC bridge arm current to ensure that the MMC does not block during the fault period.
-
The combination of ACLC and DCCB can reduce the peak breaking current by 51% and the energy absorption of lightning arresters by 84.15%, effectively reducing the technical requirements for DCCB. At the same time, it improves the adaptability of ACLC to fault resistance.
Data availability
The datasets used and/or analysed during the current study are available from the corresponding author upon reasonable request.
References
Gomis-Bellmunt, Sau-Bassols, J., Prieto-Araujo, E. & Cheah-Mane, M. Flexible converters for meshed HVDC grids: From flexible AC transmission systems (FACTS) to flexible DC grids. IEEE Trans. Power Deliv. 35(1), 2–15 (2020).
Xiang, W. et al. DC fault protection algorithms of MMC-HVDC grids: Fault analysis, methodologies, experimental validations, and future trends. IEEE Trans. Power Electron. 36(10), 11245–11264 (2021).
Yu, X. & Xiao, L. A DC fault protection scheme for MMC-HVDC grids using new directional criterion. IEEE Trans. Power Deliv. 36(1), 441–451 (2021).
Yang, S., Xiang, W., Lu, X., Zuo, W. & Wen, J. An adaptive reclosing strategy for MMC-HVDC systems with hybrid DC circuit breakers. IEEE Trans. Power Deliv. 35(3), 1111–1123 (2020).
Zhang, S., Zou, G., Wei, X., Zhou, C. & Zhou, K. Improved integrated hybrid DC circuit breaker for MTDC grid protection. IEEE Trans. Circuits Syst. II Express Briefs 69(12), 4999–5003 (2022).
Liang, S. et al. Study on the current limiting performance of a novel SFCL in DC systems. IEEE Trans. Appl. Supercond. 27(4), 1–6 (2017).
Yang, S., Xiang, W., Zhou, M., Zuo, W. & Wen, J. A single-end protection scheme for hybrid MMC HVDC grids considering the impacts of the active fault current-limiting control. IEEE Trans. Power Deliv. 36(4), 2001–2013 (2021).
Li, J., He, Y., Li, W. W. & Li, B. A novel current-commutation-based FCL for the flexible DC grid. IEEE Trans. Power Electron. 35(1), 591–606 (2020).
Chen, K. et al. A similarity comparison based pilot protection scheme for VSC-HVDC grids considering fault current limiting strategy. J. Mod. Power Syst. Clean Energy 11(4), 1305–1315 (2023).
Yang, Q. et al. Design and application of superconducting fault current limiter in a multiterminal HVDC system. IEEE Trans. Appl. Supercond. 27(4), 1–5 (2017).
Shu, H., Shao, Z. & Dai, Y. Research on the improved hybrid DC circuit breaker with voltage-limiting and current-limiting capability. Int. J. Electr. Power Energy Syst. 158, 109943 (2024).
Yu, X. et al. A novel hybrid-arm bipolar MMC topology with DC fault ride-through capability. IEEE Trans. Power Deliv. 32(3), 1404–1413 (2017).
Ni, B. et al. An adaptive fault current limiting control for MMC and its application in DC grid. IEEE Trans. Power Deliv. 36(2), 920–931 (2021).
Lacerda, V. A. et al. Control-based fault current limiter for modular multilevel voltage-source converter. Int. J. Electr. Power Energy Syst. 118, 105750 (2020).
Jiang, Q. et al. Joint limiting control strategy based on virtual impedance shaping for suppressing DC fault current and arm current in MMC-HVDC systems. J. Mod. Power Syst. Clean Energy 11(6), 2003–2014 (2023).
Li, Z., Jia, K., Bi, T. & Li, J. ACLC control in half-bridge MMC for DC fault. IEEE Trans. Ind. Electron. 72(1), 516-524(2025).
Yu, J., Zhang, Z. & Xu, Z. An active DC fault current limiting control for half-bridge modular multilevel converter based on arm voltage reconstruction. IEEE Trans. Power Deliv. 39(1), 565–577 (2024).
Gong, Z. et al. A global fault current limiting strategy for the MMC-HVDC grid with a reduced DC reactor. Int. J. Electr. Power Energy Syst. 140,108088 (2022).
Ni, B. et al. Research on the emergency current-limiting control in VSC-HVDC grid. Proc. CSEE 40(11), 3527–3536 (2020).
Ni, B. et al. Research on adaptive-current-limiting control of VSC-HVDC grid based on half-bridge MMC. Proc. CSEE 40(17), 5609–5619 (2020).
Hou, J. et al. A selective and staged active current limiting control strategy for fault identification in MMC HVDC power grids. Int. J. Electr. Power Energy Syst. 160,110143 (2024).
Huang, J., Gao, H., Zhao, L. & Feng, Y. Instantaneous active power integral differential protection for hybrid AC/DC transmission systems based on fault variation component. IEEE Trans. Power Deliv. 35(6), 2791–2799 (2020).
Funding
National Nature Science Foundation project (52442705, 2021YFB1507000), Natural Science Foundation of Xinjiang Uygur Autonomous Region (2022D01C662), Xinjiang Uygur Autonomous Region “Tianchi talents” introduction plan, the Tianshan Talent Training Project (2022TSYCLJ0019).
Author information
Authors and Affiliations
Contributions
Xiaohua Qin: Conceptualization; Data curation; Methodology; Software; Validation; Visualization; Formal analysis; Writing—original draft; Writing –review & editing. Junjie Hou: Methodology; Funding acquisition; Project administration; Supervision. Yanfang Fan: Funding acquisition; Supervision. Guobing Song: Funding acquisition; Supervision. Xiaofang Wu: Supervision, Formal analysis.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Qin, X., Hou, J., Fan, Y. et al. Improved active current limiting control for flexible DC power grid to consider the effects of selective and higher fault resistance. Sci Rep 15, 5437 (2025). https://doi.org/10.1038/s41598-025-90162-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-025-90162-5
