Citation: Weijiu Liu. A mathematical model for the robust blood glucose tracking[J]. Mathematical Biosciences and Engineering, 2019, 16(2): 759-781. doi: 10.3934/mbe.2019036
| [1] | Karen E. Lamb, Lukar E. Thornton, Ester Cerin, Kylie Ball . Statistical Approaches Used to Assess the Equity of Access to Food Outlets: A Systematic Review. AIMS Public Health, 2015, 2(3): 358-401. doi: 10.3934/publichealth.2015.3.358 |
| [2] | Bernadette M. Pauly, Sana Z. Shahram, Phuc T. H. Dang, Lenora Marcellus, Marjorie MacDonald . Health Equity Talk: Understandings of Health Equity among Health Leaders. AIMS Public Health, 2017, 4(5): 490-512. doi: 10.3934/publichealth.2017.5.490 |
| [3] | Swapna Reddy, Matthew Speer, Mary Saxon, Madison Ziegler, Zaida Dedolph, Siman Qaasim . Evaluating network adequacy of oral health services for children on Medicaid in Arizona. AIMS Public Health, 2022, 9(1): 53-61. doi: 10.3934/publichealth.2022005 |
| [4] | Rizwana Biviji, Nikita Vora, Nalani Thomas, Daniel Sheridan, Cindy M. Reynolds, Faith Kyaruzi, Swapna Reddy . Evaluating the network adequacy of vision care services for children in Arizona: A cross sectional study. AIMS Public Health, 2024, 11(1): 141-159. doi: 10.3934/publichealth.2024007 |
| [5] | LacreishaEjike-King, RashidaDorsey . Reducing Ex-offender Health Disparities through the Affordable Care Act: Fostering Improved Health Care Access and Linkages to Integrated Care. AIMS Public Health, 2014, 1(2): 76-83. doi: 10.3934/publichealth.2014.2.76 |
| [6] | Elizabeth Burner, Sophie Terp, Chun Nok Lam, Emily Neill, Michael Menchine, Sanjay Arora . Access to care, nativity and disease management among Latinos with diabetes in a safety-net healthcare setting. AIMS Public Health, 2019, 6(4): 488-501. doi: 10.3934/publichealth.2019.4.488 |
| [7] | Helena Walz, Barbara Bohn, Jessica Sander, Claudia Eberle, Monika Alisch, Bernhard Oswald, Anja Kroke . Access to Difficult-to-reach Population Subgroups: A Family Midwife Based Home Visiting Service for Implementing Nutrition-related Preventive Activities - A Mixed Methods Explorative Study. AIMS Public Health, 2015, 2(3): 516-536. doi: 10.3934/publichealth.2015.3.516 |
| [8] | PauleMiquelon, AlainLesage, RichardBoyer, StéphaneGuay, PierreBleau, MoniqueSéguin . Mental Health Service Utilization among Students and Staff in 18 Months Following Dawson College Shooting. AIMS Public Health, 2014, 1(2): 84-99. doi: 10.3934/publichealth.2014.2.84 |
| [9] | Junfeng Jiao . Measuring Vulnerable Population’s Healthy and Unhealthy Food Access in Austin, Texas. AIMS Public Health, 2016, 3(4): 722-732. doi: 10.3934/publichealth.2016.4.722 |
| [10] | Okan Bulut, Cheryl N. Poth . Rapid assessment of communication consistency: sentiment analysis of public health briefings during the COVID-19 pandemic. AIMS Public Health, 2022, 9(2): 293-306. doi: 10.3934/publichealth.2022020 |
Providing equal access to health care is an important priority in international public health policy [1,2,3,4,5,6,7]. This is because equitable access to healthcare is strongly linked with reducing ill health and suffering [8]. There are several components to measuring accessibility but the geographical aspect of accessibility describes how easily a population can travel to health services. This measure is based on: 1) the distance people live from health services, 2) how good public transport links are to the health services and 3) how long it takes to travel to such services [9]. Equal geographical access to healthcare facilities is, however, unrealistic for public health planners and policy makers to attain [10]. Rather, health services are concentrated in more densely populated areas so to serve an optimum catchment of the population. Therefore, urban populations tend to have shorter distances to travel to health services compared to rural populations [11]. There is a growing need to understand the relationship between accessibility and health in order to lessen provision inequalities [12]. The extent to which people can access services needs to be accurately assessed and effectively communicated to planners and public health practitioners so that successful policy and infrastructure planning can be implemented.
Geographical Information Systems (GIS) can be used to model geographical accessibility to health services [10,11,13,14,15,16]. Common techniques used to calculate accessibility in public health research are Euclidean (straight line) and network distance measurements. More recently, sophisticated representations of accessibility modelling such as gravity models, kernel density models and 2-step floating catchment area models [17,18,19,20] have been published in the literature. However, among public health practitioners, Euclidean and network distances methods remain popular choices for modelling spatial accessibility to services [21]. It has been suggested that for some populations and geographies, the more basic Euclidian distance measure does not provide a sufficiently representative distance estimate [22]. Alternatively, the generation of network distances may be unnecessarily complex depending on the study context [23]. The aim of this paper is to quantify the error associated with Euclidean and network distance accessibility methods so that public health practitioners can quote quantified errors when they are undertaking research and understand the limitations of research methods.
In addition to distance type, origin and destination data types also influence the accuracy of the accessibility assessment. Ideally accessibility modelling would use address level data as an origin in origin-destination calculations [24,25,26]. However, most accessibility studies use spatially aggregate origin data because: 1) often they are the only available data; 2) as a way of protecting the privacy by collating individuals into non-identifiable spatial units; 3) aggregation reduces computational and storage requirements [27]. Aggregation units are typically defined by the number of people they contain which introduces ecological fallacy, whereby an inference about an individual is made based on the population to which that individual belongs. Larger spatial units represent larger populations and smooth local variation, often leading to erroneous results and misleading conclusions [28]. When only aggregate data are available, it is important that researchers are aware that error is introduced because of the introduction of ecological fallacy into statistical models, producing biased results [29]. The extent of aggregation error should be better documented [9,30] so that the magnitude of error can be recorded and included in the analysis and interpretation of results.
In this study we have examined the potential access to General Practitioner (GP) surgery (Primary Care Physician) locations. In the UK there are no fees incurred per visit to the GP under the National Health Service (NHS), which is available to all, and an individual typically registers with a GP surgery near their home. We have used widely applied distance measures at four levels of aggregation, compared the different methodological approaches and quantified the error associated with each method. We discuss the implications of using inappropriate accessibility estimates, before recommending which methods should be used in different study contexts. We highlight the importance of assigning people to their correct facility, and the implications of assigning people to the wrong facility. This study includes a range of population geographies, several measurement techniques and rural and urban comparisons for a city with a different urban form to those found in North America.
This study was set in the Swansea administrative area in the United Kingdom. Swansea is the second largest city in Wales, UK with a population of 240,300 [31]distributed amongst 109,640 households. The population is distributed across a variety of urban and rural landscapes with a population density ranging from 30 people per km2 to 6810 people per km2 [32]. The variability of Swansea’s population distribution makes it representative of a typical UK population.
The 47 GP surgery locations in the Swansea administrative area were identified using the Ordnance Survey Points of Interest dataset and confirmed using the list on the NHS Wales Informatics Service Website [33,34]. Residential address locations (n = 109,640) within the Swansea administrative area were extracted from AddressBase Premium [35]. Four commonly used spatially aggregated units of population were used to generate comparator data namely: Unit Postcode (the base unit of postal geographies in the UK), Output Area (OA), Lower Super Output Area (LSOA) and Middle Super Output Area (MSOA). Unit Postcode data from Code Point were supplied by the Ordnance Survey [36] and provided boundary polygons for each unit postcode. The OA, LSOA and MSOA aggregation units are from the 2011 UK Census of Population, Office for National Statistics [36]. Spatial units are designed to meet specific homogeneity criteria so that they are comparable by population size [37]. The different aggregation units used in this study are listed in Table 1, together with international equivalents, and their relative spatial coverage displayed in Figure 1.
| Spatial Unit | Average Population | Comparable International Units |
| Unit Postcode | 50 | Japan: Prefecture |
| OA | 100 | Australia: Meshblock |
| LSOA | 1500 | Japan: Municipality; USA: Block Group |
| MSOA | 7500 | USA: ZIP Codes; Australia: SA2s |
 DownLoad: CSV
DownLoad: CSV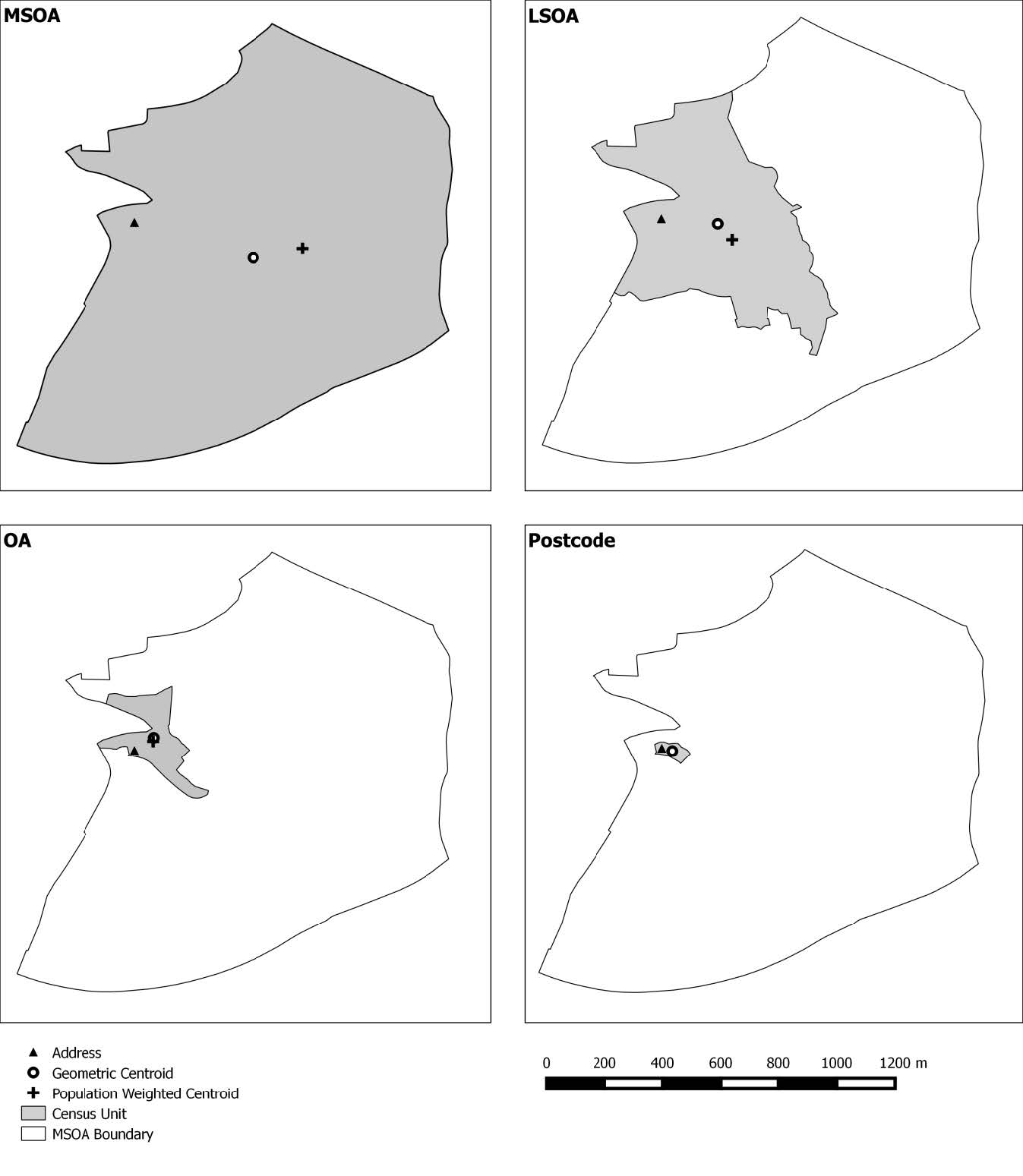 Figure 1. Census unit boundaries.
Figure 1. Census unit boundaries.
Each LSOA was classified as rural or urban based on the rurality index generated by the Office of National Statistics [37]. Areas with less than 10,000 people were classified as rural and those with more than 10,000 people classified as urban. The road and footpath network was provided by the OS MasterMap Integrated Transport Network (ITN) Layer [38].
Distance measures were created at address level and the specified aggregation units using two GIS methodologies - network distances and Euclidean (straight line) distances. The network distance from each address and aggregation unit to the nearest GP surgery was measured in a GIS using the network route to create Origin-Destination (OD) matrices. For Euclidean distances, the ‘Near’ tool was used (ArcGISTM 10.1).
Address level network distance was defined as the gold standard as it was most likely (methodologically) to represent the true distance between a residence and a GP surgery. For each unit of aggregation, population weighted and geometric centroids were used as the origin of the journey for the population represented within that unit. Population weighted centroids for OA, LSOA and MSOA were obtained from ONS [39]. Both centroid types were used in the analysis to assess the impact of the commonly used population weighted centroid on distance measures.
Due to the non-normal distribution of the data, a Spearman’s Rank coefficient was performed using the raw distance data. This method was used to identify correlations between the different distance measures (spatial unit and different centroids) and the gold standard address-based network distance estimates. The address-based network distance estimates were used as a baseline against which all other distance and aggregation unit measurement methods were compared. The median distance refers to the median of distance measures from the centroid of a spatial unit to its nearest GP in the study area, and have been described as a distance error for the purpose of this study. Further to this, the proportion of homes that were assigned to an incorrect GP as the nearest GP was recorded. This was so that the impact of methodology and areal unit size on an individual’s GP assignment could be assessed.
The distance calculation method, level of spatial aggregation and centroid type are reviewed with comparisons made between each distance calculated and stratified against the rurality of the areal unit. Distance estimates and associated statistics are summarised for each distance method, and all spatial aggregation units and centroid types (Table 2). Error was reported as the difference between the gold standard distance and the modelled distances.
| Address | Unit Postcode | OA.G | LSOA.G | MSOA.G | OA.W | LSOA.W | MSOA.W | ||
| Urban | Euclidean | ||||||||
| Median | 590 | 597 | 613 | 634 | 668 | 580 | 550 | 419 | |
| IQR | 623 | 623 | 649 | 737 | 778 | 623 | 608 | 340 | |
| Max. | 3,134 | 3,100 | 3,039 | 2,964 | 4,704 | 2,896 | 2,875 | 2,972 | |
| Network | |||||||||
| Median | 849 | 865 | 902 | 1,041 | 1,106 | 840 | 824 | 576 | |
| IQR | 829 | 836 | 895 | 922 | 1,170 | 818 | 790 | 578 | |
| Max. | 4,552 | 5,048 | 4,202 | 3,859 | 6,815 | 4,544 | 3,606 | 3,404 | |
| Rural | Euclidean | ||||||||
| Median | 1,377 | 1,413 | 1,525 | 1,770 | 1,811 | 1,312 | 1,125 | 879 | |
| IQR | 1,767 | 1,767 | 1,892 | 2,026 | 891 | 1,847 | 1,962 | 2,365 | |
| Max. | 7,255 | 8,329 | 6,060 | 5,532 | 4,704 | 6,961 | 4,683 | 3,384 | |
| Network | |||||||||
| Median | 1,809 | 1,941 | 2,037 | 2,830 | 2,550 | 1,766 | 1,381 | 1,120 | |
| IQR | 2,236 | 2,293 | 2,499 | 2,410 | 960 | 2,321 | 2,199 | 2,405 | |
| Max. | 11,410 | 12,270 | 9,854 | 10,220 | 6,815 | 9,107 | 8,018 | 4,002 | |
DownLoad: CSVThe network distance methodology produced a wider range of distances than Euclidean distances. This is demonstrated by a larger interquartile range (IQR, Table 2). Despite the larger IQR, network distances produced smaller error margins relative to the gold standard. In contrast, the Euclidean distance measures result in a smaller IQR, but larger error margins than network distances. The correlation between Euclidean and network distances were assessed using Spearman’s rank (Figure 2). Each distance measure was compared to the gold standard measure. The plots of the ρ coefficients reveal that Euclidean and network distances have a positive linear relationship at each level of spatial aggregation. All distance measures were found to be significantly related to the gold standard (p < 0.01). However, the Spearman’s ρ coefficient values indicates the strength of the relationship ranges from weak (0.19 for the largest areas (MSOA)) to strong (0.99 for the smallest areas (Unit Postcodes)). The ρ coefficient values have a greater range in rural areas than urban areas (Figure 2(b)).
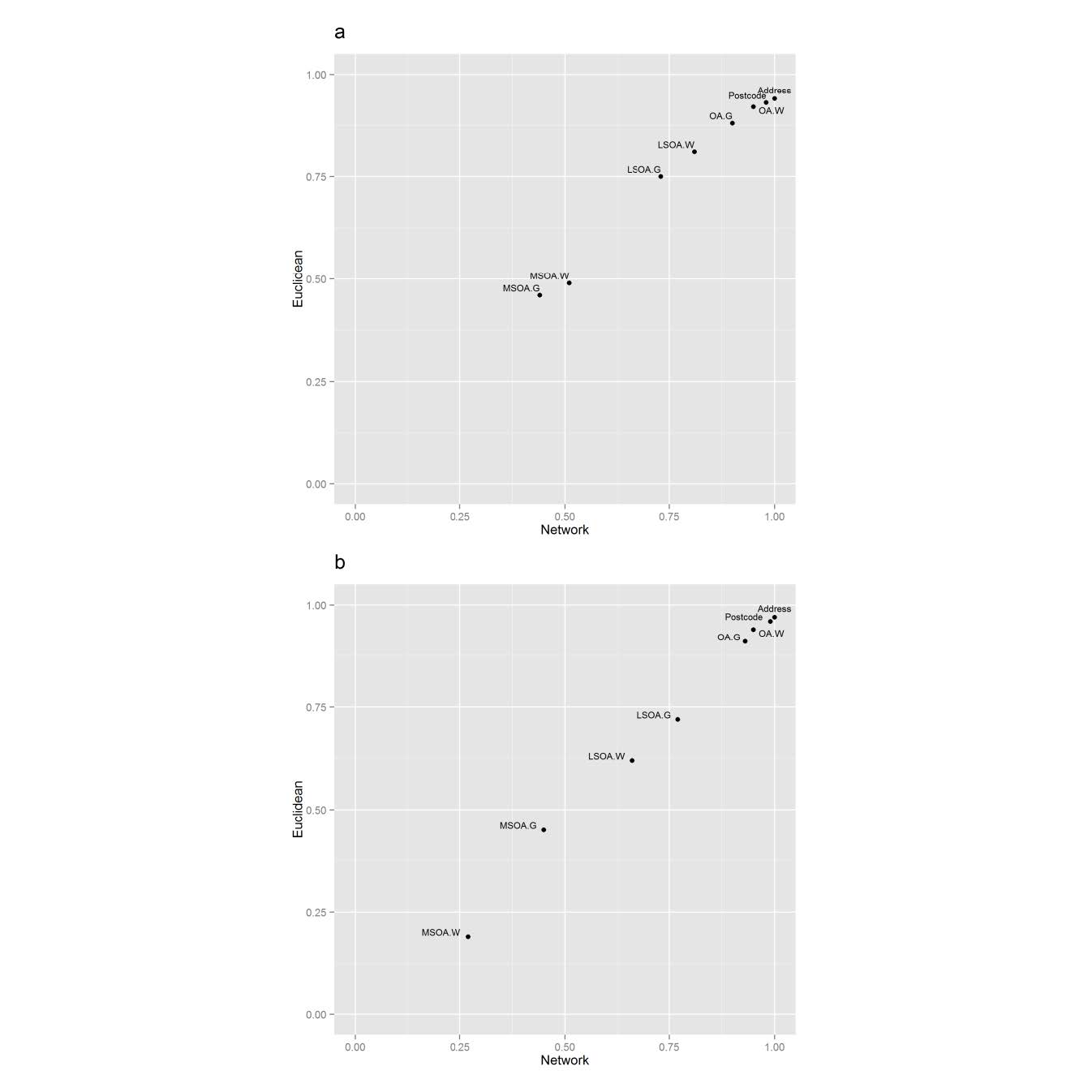 Figure 2. Relationship between Euclidean and network distance measures. (G, geometric; W, population weighted): (a) Urban morphologies (b) Rural morphologies.
Figure 2. Relationship between Euclidean and network distance measures. (G, geometric; W, population weighted): (a) Urban morphologies (b) Rural morphologies.
For urban areas, Euclidean distance errors were greater than network distance errors. However, in rural regions, Euclidean distances have far smaller distance errors when using geometric centroids (Figure 3). Overall, Euclidean and network distance errors are smaller for urban regions compared to rural regions.
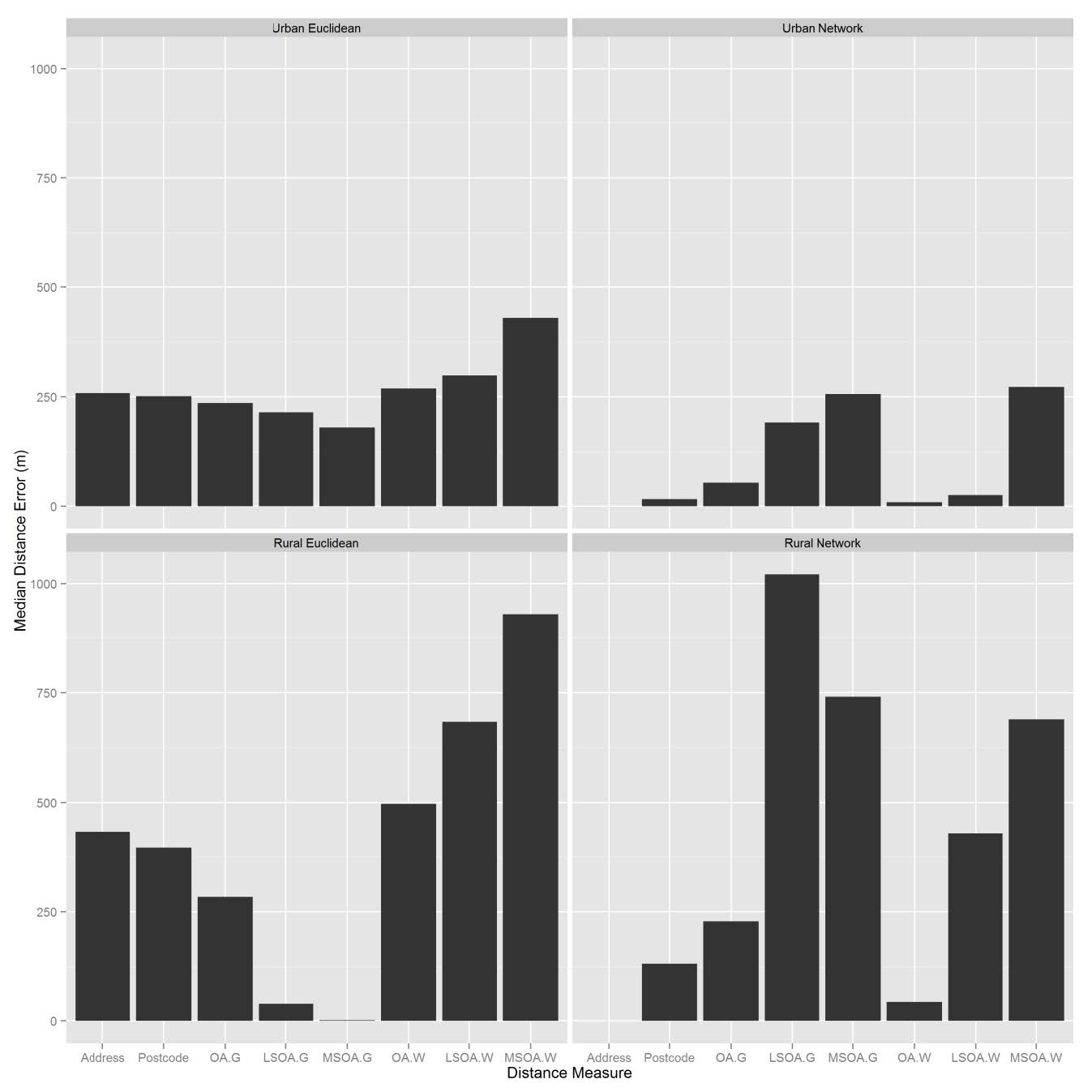 Figure 3. Median distance errors.
Figure 3. Median distance errors.
Urban areas recorded smaller distance errors for all levels of spatial aggregation than rural areas for every distance type (Figure 3). The maximum error was for LSOA Euclidean distances in urban areas (485m) and LSOA Network distances in rural areas (1021m). As the level of spatial aggregation increased, the distance errors for both network and Euclidean methods increased compared to the gold standard. For data aggregated at the MSOA level, although they are not the largest distance errors, there is an overall correlation of less than 0.5 with the gold standard, indicating that neither distance method is an acceptable solution for data aggregated at the MSOA level.
The use of population weighted centroids with the network distance method in urban areas produced smaller distance errors than geometric centroids. For urban Euclidean distances, distance errors did not vary much between centroid type (Figure 3). In rural regions, at LSOA and MSOA level, geometric centroids produced the greater distance errors when combined with network distances. In contrast, for Euclidean distances, population weighted network distances produced greater errors than Euclidean geometric distances.
Geometric centroids (G) and population weighted (W) centroids are compared for all distance methods (Euclidean and network) by morphology (urban or rural).
Address-based network distances were assumed to have resulted in 100% of people assigned correctly to their nearest GP. Relative to this, the number of GPs incorrectly assigned to households increased as the spatial unit size increased (Table 3, Figure 4).
| Urban | |||||||||
| Unit Postcode | OA.G | LSOA.G | MSOA.G | OA.W | LSOA.W | MSOA.W | |||
| Network | n | 0 | 3,650 | 11,427 | 21,926 | 33,755 | 7,327 | 16,329 | 35,534 |
| % | 0 | 3.8 | 11.8 | 22.6 | 34.8 | 7.7 | 16.8 | 36.6 | |
| Euclidean | n | 14,047 | 15,368 | 19,747 | 29,280 | 39,021 | 16,456 | 21,110 | 36,654 |
| % | 14.5 | 15.8 | 20.4 | 30.2 | 40.2 | 17.0 | 21.8 | 37.8 | |
| Rural | |||||||||
| Unit Postcode | OA.G | LSOA.G | MSOA.G | OA.W | LSOA.W | MSOA.W | |||
| Network | n | 0 | 138 | 642 | 1846 | 4946 | 459 | 1793 | 3713 |
| % | 0 | 1.1 | 5.1 | 14.6 | 39.2 | 3.6 | 14.2 | 29.5 | |
| Euclidean | n | 960 | 948 | 1457 | 1731 | 5489 | 1064 | 1678 | 3713 |
| % | 7.6 | 7.5 | 11.6 | 13.7 | 43.5 | 8.4 | 13.3 | 29.5 |
DownLoad: CSV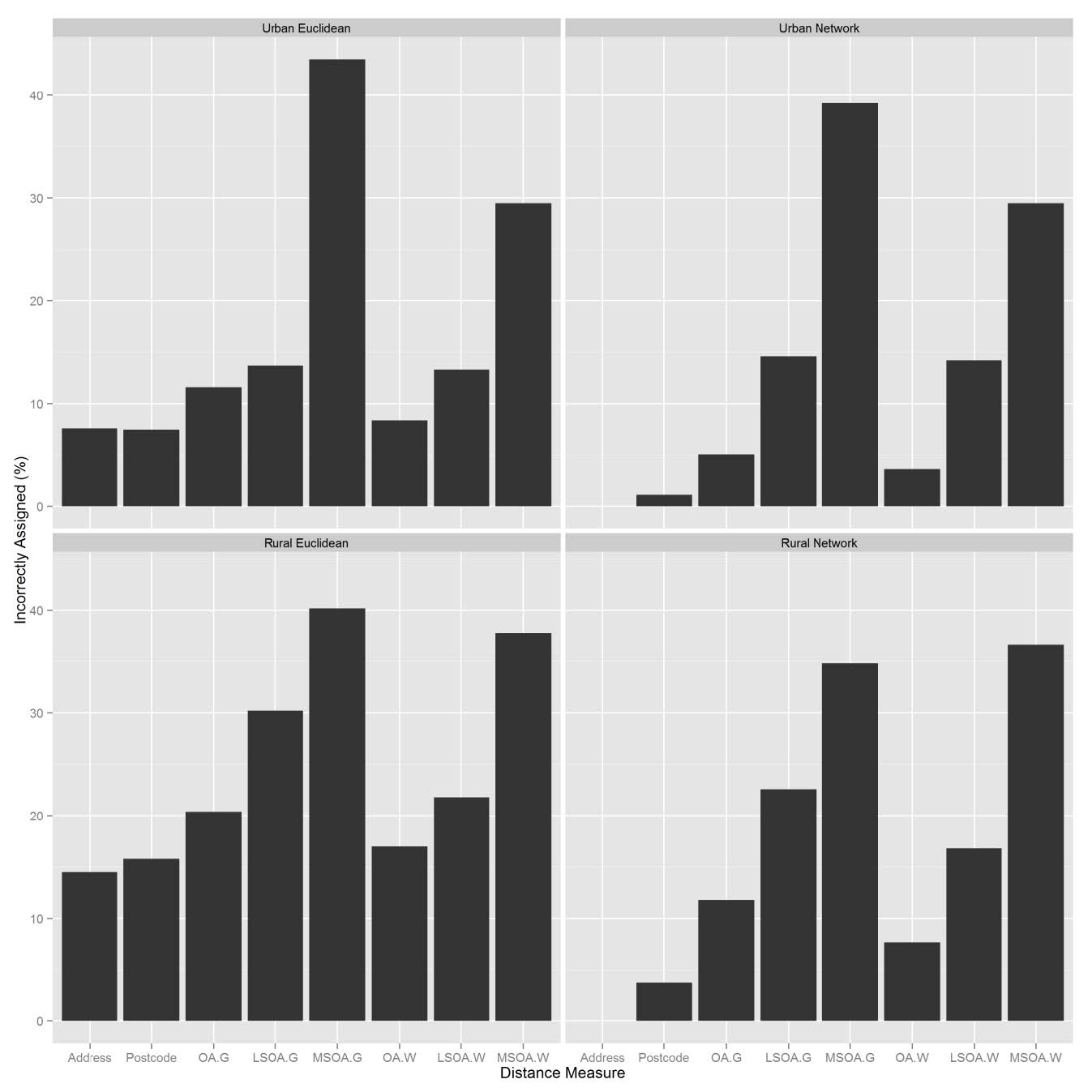 Figure 4. Nearest facility assignment errors.
Figure 4. Nearest facility assignment errors.
At every spatial unit, network distances correctly assigned more households than Euclidean distances. The largest error occurred when a Euclidean distance method was used with a geometric centroid for MSOA’s resulting in 44% of households incorrectly assigned to the correct GP. Using a population weighted centroid decreased the number of people incorrectly assigned to the nearest GP by more than 10% when using OA or LSOA data. Residents were more likely to be assigned to an incorrect GP if they lived in a rural area. The Spearman’s rank ρ value for the address-based network distance method and urban OA for network and Euclidean distances, was 0.90 and 0.91 respectively. However, in practical terms 11% or 11,427 people were assigned to the wrong GP using the network method, rising to 20% or 19,747 people using the Euclidean distance method. At every level of aggregation, the more complex the distance method, the lower the rate of incorrect assignment. Rural Euclidean distances had higher rates of incorrect assignment than network distances. In LSOAs where there were no GP surgeries, over 75% of residents were incorrectly assigned with Euclidean distances, compared to 30-50% for network distances.
This study has demonstrated that measuring access to services, such as GP’s, can be complex and result in a wide range of accessibility measures, depending on the methodology and data used.
Previous research that investigated distances to hospitals in the USA found little difference between Euclidean and network distance methods [23]. However, we recommend that network measures should be used in favour of Euclidean measures whenever possible. In large urban areas it could be argued that Euclidean distances are an adequate proxy for the distance travelled. Urban areas have greater concentrations of people living in close proximity to each other and there is greater connectivity in road and footpath networks. Increased connectivity allows the population to move more directly around the area in which they live, i.e. there is more opportunity to travel the “Euclidean route”. The increased street connectivity combined with smaller geographical areas covered by the aggregation unit (compared to rural areas) results in the Euclidean distance acting as a reasonable proxy for network distances. Euclidean measures should be used with caution as they do not take into account topographic considerations and can result in environmental exposures being lost or masked. For example, rivers, railway lines and motorways are barriers which can have a great impact on an individual’s ability to access a service. Such barriers can be accounted for with network distances. Using network distances over Euclidean distances will be particularly relevant where road networks have evolved differently to a planned grid based system like those in North America and Australia. Network distances and routes provide greater detail about the local environment that people experience when travelling to reach their destination compared to Euclidean distances. Future research will be able to provide important information about exposures within the environment, which could be used to contextualise data and better understand social behaviours. These are important considerations for progressing towards developing accessibility models that model a realistic journey that is taken by an individual.
The Spearman’s rank correlation coefficient values suggest that although all distance measures are significantly related to one another (p < 0.01), the strength of this relationship becomes weaker as the spatial unit increases in size. This supports findings in the literature [9,40,41]. If individual level data is not available, we recommend that the smallest unit of aggregation be used. This is so that ecological fallacy is kept to a minimum and spatial variation can be modelled to a meaningful resolution.
This study has shown that in urban areas, if aggregate data is being used, the use of population weighted centroids produces smaller errors in measurements when combined with network measures of distance. However, if network distances are not available, Euclidean distance measures should be combined with geometric centroids. The combination of geometric centroids with Euclidean distances produces smaller distance errors than using population weighted centroids with Euclidean distances. The results of this study indicate that the use of geometric centroids with a Euclidean measure of distance produce more favourable results for rural areas. This is because the generalisation of the Euclidean geometric distances for LSOA and MSOA better represents the spatial variable of the distance travelled by the large population that is contained within these census units.
This study used an authoritative classification system [37] to stratify the data as urban or rural. It should, however, be acknowledged that the use of an alternate classification system could produce different results. In rural regions, where fewer people live and residential addresses are less densely clustered, or occur in pockets of clusters, geographical variation is more difficult to characterise in aggregate data than in urban areas. In the larger spatial units (MSOAs and LSOAs) in rural areas, spatial variation is smoothed to a greater extent. The differing stratification of morphologies may contribute to why previous studies have conflicting findings and to our knowledge the differences between urban and rural regions has not been reported before.
Defining rural and urban regions and recognising their differences are important for policy design and service planning [22]. It has been shown that characterising an area by its physical attributes at finer spatial resolution will allow for more detailed settlement types to be characterised [42], not just urban/rural regions. This may help planners, particularly in rural regions to better assess demand for a service. Rural areas tend to have poorer access to healthcare [43,44] but by using small level aggregation units or, ideally, address data, accurate spatialdistributions of populations can investigated which will give more accurate accessibility assessments [40].
To our knowledge, errors associated with network and Euclidean distances have not been quantified before. Quantifying the errors associated with commonly used distance methods will be a useful to public health practitioners and researchers who use these GIS methods to measure accessibility. Although there are more sophisticated methods available to calculate accessibility, network and Euclidean distances are a popular choice for public health practitioners and non-specialist GIS users. It is therefore important that users be aware of the error associated with their chosen method so that when analysing and the presenting results, the data is not assumed to be error free.
Further assessment of the distance methodologies examined the proportion of households that were assigned to the ‘correct’ GP. The correlation results show that based on distance from address to nearest GP, Euclidean distances are strongly correlated to network distances. However, at unit postcode level (r = 0.95 for Euclidean vs network distances), 12,000 more homes are sent to the wrong GP using the Euclidean method. This is an important consideration for cases where it matters which facility people are using and the assignment of individuals to services based on catchment areas. Depending on the methodology chosen there may be too few facilities in the most appropriate locations to meet demand. Conversely, over estimating the demand on a facility may lead to unnecessary resources being sent to a facility. In the context of facilities that treat chronic illnesses, the wrong assignment of households to the correct service centre could influence estimations on survival rates. A further consideration that must be taken in to account when using aggregate data is the ecological fallacy or “all or nothing” nature of assigning aggregate populations to the nearest facility. For example, at LSOA level 1500 people will all be routed to the same facility. For urban regions this had the most detrimental effect with up to 29,280 home being routed to the wrong facility at LSOA level. This is because there are more GP facilities in urban areas. Therefore within the aggregate unit there will be a greater variation in the GP that a population attend.
There are number of suggestions for further work and considerations to make: 1) Investigate facilities that are designed to serve larger populations, such as hospitals. It is likely that the correlation between Euclidean and network distances will be even weaker. This is because the number of natural and man-made barriers encountered on a longer journey, such as lakes and train lines will be greater. 2) We investigated accessibility to GPs which are expected to be within walking distance of under 4km [45]. Further work would be advised to consider topographic features of the local environment, such as elevation, en-route to facilities that are within walking distance. Topographic features may not be accurately captured when using the Euclidean method, and as such could be an important consideration that may reduce the correlation with network distances.
Although more sophisticated methods of accessibility are being and have been developed in research environments, the use of Euclidean and network distances remain a popular choice for modelling accessibility. The benefits and downfalls of these two distance methods have been well documented but the errors associated with the methodologies have not been quantified prior to this study. Further to the distance method introducing error in to accessibility modelling, aggregated data also produces errors. For future studies, the use of household level data should be encouraged; particularly in health studies. However, it should also be acknowledged that high resolution population data is often not available. No model is a perfect representation of the real world so it is important to acknowledge the error that is introduced by a methodology. In cases where aggregate data is being used, this study provides an aide-memoire that will allow practitioners and researchers to understand the implications of using particular data and methods.
The work was undertaken with the support of The Centre for the Development and Evaluation of Complex Interventions for Public Health Improvement (DECIPHer), a UKCRC Public Health Research Centre of Excellence. Joint funding (MR/KO232331/1) from the British Heart Foundation, Cancer Research UK, Economic and Social Research Council, Medical Research Council, the Welsh Government and the Wellcome Trust, under the auspices of the UK Clinical Research Collaboration, is gratefully acknowledged.
We also acknowledge the support from The Farr Institute of Health Informatics Research. The Farr Institute is supported by a 10-funder consortium: Arthritis Research UK, the British Heart Foundation, Cancer Research UK, the Economic and Social Research Council, the Engineering and Physical Sciences Research Council, the Medical Research Council, the National Institute of Health Research, the National Institute for Social Care and Health Research (Welsh Assembly Government), the Chief Scientist Office (Scottish Government Health Directorates), the Wellcome Trust, (MRC Grant Nos: CIPHER MR/K006525/1).
All authors declare no conflicts of interest in this paper
| [1] | E. Ackerman, J.W. Rosevear andW. F. McGuckin, A mathematical model of the glucose-tolerance test, Phys. Med. Biol., 9 (1964), 203–213. |
| [2] | E. Ackerman, L. C. Gatewood, J. W. Rosevear and G. D. Molnar, Model studies of blood glucose regulation, Bull. Math. Biophys., 27 (1965), 21–37. |
| [3] | B. Ashley and W. Liu, Asymptotic tracking and disturbance rejection of the blood glucose regulation system, Math. Biosci., 289 (2017), 78–88. |
| [4] | R. N. Bergman, Y. Z. Ider, C. R. Bowden and C. Cobelli, Quantitative estimation of insulin sensitivity, Am. J. Physiol. Endocrinol. Metab., 236 (1979), E667–E677. |
| [5] | R. N. Bergman, L. S. Phillips and C. Cobelli, Measurement of insulin sensitivity and β-cell glucose sensitivity from the response to intraveous glucose, J. Clin. Invest., 68 (1981), 1456–1467. |
| [6] | R. N. Bergman, D. T. Finegood and M. Ader, Assessment of insulin sensitivity in vivo, Endocrine Reviews, 6 (1985), 45–86. |
| [7] | R. N. Bergman, Toward physiological understanding of glucose tolerance, Minimal-model approach, Diabetes, 38 (1989), 1512–1527. |
| [8] | A. Bertoldo, R. R. Pencek, K. Azuma, J. C. Price, C. Kelley, C. Cobelli and D. E. Kelley, Interactions between delivery, transport, and phosphorylation of glucose in governing uptake into human skeletal muscle, Diabetes, 55 (2006), 3028–3037. |
| [9] | J. Carr, Applications of Center Manifold Theory, Applied Mathematical Sciences 35, Springer, New York, 1981. |
| [10] | C. Cobelli, G. Federspil, G. Pacini, A. Salvan and C. Scandellari, An integrated mathematical model of the dynamics of blood glucose and its hormonal control, Math. Biosci., 58 (1982), 27– 60. |
| [11] | K. Fessel, J. B. Gaither, J. K. Bower, G. Gaillard and K. Osei, Mathematical analysis of a model for glucose regulation, Mathematical Biociences and Engineering, 13(2016), 83–90. |
| [12] | L. B. Freidovich and H. K. Khalil, Performance recovery of feedback-linearization-based designs, IEEE Trans. Automat. Contr., 53 (2008), 2324–2334. |
| [13] | W. T. Garvey, L. Maianu, J. H. Zhu, G. Brechtel-Hook, P. Wallace and A. D. Baron, Evidence for defects in the tra cking and translocation of GLUT4 glucose transporters in skeltal muscle as a cause of human insulin resistance, J. Clin. Invest., 101 (1998), 2377–2386. |
| [14] | C. J. Goodner, B. C. Walike, D. J. Koerker, J. W. Ensinck, A. C. Brown, E. W. Chideckel, J. Palmer and L. Kalnasy, Insulin, glucagon, and glucose exhibit synchronous, sustained oscillations in fasting monkeys, Science, 195 (1977), 177–179. |
| [15] | O. I. Hagren and A. Tengholm, Glucose and insulin synergistically activate phosphatidylinositol 3- kinase to trigger oscillations of phosphatidylinositol 3,4,5-trisphosphate in β-cells, J. Biol. Chem., 281 (2006), 39121–39127. |
| [16] | B. C. Hansen, K. C. Jen, S. B. Pek and R. A.Wolfe, Rapid oscillations in plasma insulin, glucagon, and glucose in obese and normal weight humans. J. Clin. Endocr. Metab., 54 (1982), 785–792. |
| [17] | A. Klip and M. Vranic, Muscle, liver, and pancreas: Three Musketeers fighting to control glycemia, Am. J. Physiol. Endocrinol. Metab., 291 (2006), E1141–E1143. |
| [18] | R. Hovorka, Continuous glucose monitoring and closed-loop systems, Diabetic Med., 23 (2006), 1–12. |
| [19] | J. Huang, Nonlinear output regulation, theory and applications, Society for Industrial and Applied Mathematics, Philadelphia, 2004. |
| [20] | H. Kang, K. Han and M. Choi, Mathematical model for glucose regulation in the whole-body system, Islets, 4 (2012), 84–93. |
| [21] | D. A. Lang, D. R. Matthews, J. Peto, and R. C. Turner, Cyclic oscillations of basal plasma glucose and insulin concentrations in human beings, New Engl. J. Med., 301 (1979), 1023–1027. |
| [22] | J. Lee, R. Mukherjee and H.K. Khalil, Output feedback performance recovery in the presence of uncertainties, Syst. Control Lett., 90 (2016), 31–37. |
| [23] | J. Li, Y. Kuang and C. C. Mason, Modeling the glucose-insulin regulatory system and ultradian insulin secretory oscillations with two explicit time delays, J. Theor. Biol., 242 (2006), 722–735. |
| [24] | W. Liu and F. Tang, Modeling a simplified regulatory system of blood glucose at molecular levels, J. Theor. Biol., 252 (2008), 608–620. |
| [25] | W. Liu, C. Hsin, and F. Tang, A molecular mathematical model of glucose mobilization and uptake, Math. Biosciences, 221 (2009), 121–129. |
| [26] | W. Liu, Elementary Feedback Stabilization of the Linear Reaction Diffusion Equation and the Wave Equation, Mathematiques et Applications, Vol. 66, Springer, 2010. |
| [27] | W. Liu, Introduction to Modeling Biological Cellular Control Systems, Modeling, Simulation and Applications, Vol. 6, Springer, 2012. |
| [28] | K. Ma, H. K. Khalil and Y. Yao, Guidance law implementation with performance recovery using an extended high-gain observer, Aerosp. Sci. Technol., 24 (2013), 177–186. |
| [29] | C. D. Man, A. Caumo, R. Basu, R. A. Rizza, G. Toffolo and C. Cobelli, Minimal model estimation of glucose absorption and insulin sensitivity from oral test: validation with a tracer method, Am. J. Physiol. Endocrinol. Metab., 287 (2004), E637–E643. |
| [30] | C. D. Man, M. Campioni, K. S. Polonsky, R. Basu, R. A. Rizza, G. Toffolo and C. Cobelli, Twohour seven-sample oral glucose tolerance test and meal protocol: minimal model assessment of β-cell responsivity and insulin sensitivity in nondiabetic individuals, Diabetes, 54 (2005), 3265– 3273. |
| [31] | C. D. Man, R. A. Rizza and C. Cobelli, Meal simulation model of the glucose-insulin system, IEEE Trans. Biomed. Eng., 54 (2007), 1740–1749. |
| [32] | H. Nishimura, F. Pallardo, G. A. Seidner, S. Vannucci, I. A. Simpson and M. J. Birnbaum, Kinetics of GLUT1 and GLUT4 glucos transporters expressed in Xenopus oocytes, J. Biol. Chem., 268 (1993), 8514–8520. |
| [33] | A. E. Panteleon, M. Loutseiko, G. M. Steil and K. Rebrin, Evaluation of the effect of gain on the meal response of an automated closed-loop insulin delivery system, Diabetes, 55 (2006), 1995– 2000. |
| [34] | A. R. Sedaghat, A. Sherman and M. J. Quon, A mathematical model of metabolic insulin signaling pathways, Am. J. Physiol. Endocrinol. Metab., 283 (2002), E1084–E1101. |
| [35] | E. T. Shapiro, H. Tillil, K. S. Polonsky, V. S. Fang, A. H. Rubenstein and E. V. Cauter, Oscillations in insulin secretion during constant glucose infusion in normal man: relationship to changes in plasma glucose, J. Clin. Endocr. Metab., 67 (1988), 307–314. |
| [36] | C. Simon, G. Brandenberger and M. Follenius, Ultradian oscillations of plasma glucose, insulin, and C-peptide in man during continuous enteral nutrition, J. Clin. Endocr. Metab., 64 (1987), 669–674. |
| [37] | J. T. Sorensen, A Physiological Model of Glucose Metabolism in Man and its Use to Design and Assess Improved Insulin Therapies for Diabetes, PhD Thesis, Massachusetts Institute of Technology, 1985. |
| [38] | G. M. Steil, K. Rebrin, C. Darwin, F. Hariri and M. F. Saad, Feasibility of automating insulin delivery for the treatment of type 1 diabetes, Diabetes, 55 (2006), 3344–3350. |
| [39] | J. Sturis, E. V. Cauter, J. D. Blackman and K. S. Polonsky, Entrainment of pulsatile insulin secretion by oscillatory glucose infusion, J. Clin. Invest., 87 (1991), 439-445. |
| [40] | J. Sturis, K. S. Polonsky, E. Mosekilde and E. V. Cauter, Computer model for mechanisms underlying ultradian oscillations of insulin and glucose, Am. J. Physiol. Endocrinol. Metab., 260 (1991), E801–E809. |
| [41] | G. Toffolo and C. Cobelli, The hot IVGTT two-compartment minimal model: an improved version, Am. J. Physiol. Endocrinol. Metab., 284 (2003), E317–E321. |
| [42] | G. Toffolo, M. Campioni, R. Basu, R. A. Rizza and C. Cobelli, A minimal model of insulin secretion and kinetics to assess hepatic insulin extraction, Am. J. Physiol. Endocrinol. Metab. 290 (2006), E169–E176. |
| [43] | I. M. Tolic, E. Mosekilde and J. Sturis, Modeling the insulin-glucose feedback system: the significance of pulsatile insulin secretion, J. Theor. Biol., 207 (2000), 361–375. |
| [44] | R. C. Turner, R. R. Holman, D. Matthews, T. D. Hockaday and J. Peto, Insulin deficiency and insulin resistance interaction in diabetes: estimation of their relative contribution by feedback analysis from basal plasma insulin and glucose concentrations, Metabolism, 28 (1979), 1086– 1096. |
| [45] | O. Vahidi, K. E. Kwok, R. B. Gopaluni and L. Sun, Developing a physiological model for type II diabetes mellitus, Biochem. Eng. J., 55 (2011), 7-16. |
| [46] | O. Vahidi1, K. E. Kwok, R. B. Gopaluni and F. K. Knop, A comprehensive compartmental model of blood glucose regulation for healthy and type 2 diabetic subjects, Med. Biol. Eng. Comput., 54 (2016), 1383-1398. |
| [47] | R. R. Wolfe, J. R. Allsop and J. F. Burke, Glucose metabolism in man: Responses to intravenous glucose infusion, Metabolism, 28 (1979), 210–220. |
| 1. | Richard Fry, Scott Orford, Sarah Rodgers, Jennifer Morgan, David Fone, A best practice framework to measure spatial variation in alcohol availability, 2020, 47, 2399-8083, 381, 10.1177/2399808318773761 | |
| 2. | António dos Anjos Luis, Pedro Cabral, Geographic accessibility to primary healthcare centers in Mozambique, 2016, 15, 1475-9276, 10.1186/s12939-016-0455-0 | |
| 3. | James Bryant, Paul L. Delamater, Examination of spatial accessibility at micro- and macro-levels using the enhanced two-step floating catchment area (E2SFCA) method, 2019, 25, 1947-5683, 219, 10.1080/19475683.2019.1641553 | |
| 4. | Claudia Costa, José António Tenedório, Paula Santana, Disparities in Geographical Access to Hospitals in Portugal, 2020, 9, 2220-9964, 567, 10.3390/ijgi9100567 | |
| 5. | Mosa Ali Shubayr, Estie Kruger, Marc Tennant, Geographic accessibility to public dental practices in the Jazan region of Saudi Arabia, 2022, 22, 1472-6831, 10.1186/s12903-022-02279-y | |
| 6. | Hye Jung Choi, Marissa LeBlanc, Tron Anders Moger, Morten Valberg, Geir Aamodt, Christian M. Page, Grethe S. Tell, Øyvind Næss, Stroke survival and the impact of geographic proximity to family members: A population-based cohort study, 2022, 309, 02779536, 115252, 10.1016/j.socscimed.2022.115252 | |
| 7. | Nitya Rao, Joshua Chang, David Paydarfar, Characterizing the performance of emergency medical transport time metrics in a residentially segregated community, 2021, 50, 07356757, 111, 10.1016/j.ajem.2021.07.013 | |
| 8. | Sarah J. Knight, Colin J. McClean, Piran C.L. White, The importance of ecological quality of public green and blue spaces for subjective well-being, 2022, 226, 01692046, 104510, 10.1016/j.landurbplan.2022.104510 | |
| 9. | Yue Wu, Lei Xia, Jun He, Qi Meng, Da Yang, Fangfang Liu, Nan Liu, Investigating Accessibility of Hospitals in Cold Regions: A Case Study of Harbin in China, 2023, 16, 1937-5867, 142, 10.1177/19375867221120201 | |
| 10. | Alexander Michels, Jinwoo Park, Jeon‐Young Kang, Shaowen Wang, An Areal Approach to Spatial Accessibility Analysis, 2024, 0016-7363, 10.1111/gean.12415 | |
| 11. | Lucas H. McCabe, 2024, Nonparametric Estimation and Comparison of Distance Distributions from Censored Data, 979-8-3503-6929-8, 1, 10.1109/CISS59072.2024.10480196 | |
| 12. | 2024, 9781786309303, 121, 10.1002/9781394300778.ch7 | |
| 13. | Grace Heymsfield, Elizabeth Radin, Marie Biotteau, Suvi Kangas, Zachary Tausanovitch, Casie Tesfai, Léonard Kiema, Wenldasida Thomas Ouedraogo, Badou Seni Mamoudou, Mahamat Garba Issa, Lievin Bangali, Marie Christine Atende Wa Ngboloko, Balki Chaïbou, Maman Bachirou Maman, Eva Leidman, Oleg Bilukha, Estimating program coverage in the treatment of acute malnutrition using population-based cluster survey methods: results from surveys in Burkina Faso, Chad, Democratic Republic of the Congo, and Niger, 2025, 13, 2296-2565, 10.3389/fpubh.2025.1513567 | |
| 14. | Zhuolin Tao, Rui Zhang, Cheng Liu, Qianyu Zhong, On the Modifiable Areal Unit Problem (MAUP) in healthcare accessibility measurement via the two-step floating catchment area (2SFCA) method, 2025, 93, 13538292, 103468, 10.1016/j.healthplace.2025.103468 | |
| 15. | Naser Ahmed, Eunice Chu, Fariha Mustafa, Reyhane Javanmard, Jesmin Jui, Jinhyung Lee, Understanding inequalities in spatial accessibility to multi-tier healthcare for older adults in rapidly aging Bangladesh, 2025, 44, 22141405, 102121, 10.1016/j.jth.2025.102121 |
Figures(6) / Tables(1)

Weijiu Liu. A mathematical model for the robust blood glucose tracking[J]. Mathematical Biosciences and Engineering, 2019, 16(2): 759-781. doi: 10.3934/mbe.2019036

| Spatial Unit | Average Population | Comparable International Units |
| Unit Postcode | 50 | Japan: Prefecture |
| OA | 100 | Australia: Meshblock |
| LSOA | 1500 | Japan: Municipality; USA: Block Group |
| MSOA | 7500 | USA: ZIP Codes; Australia: SA2s |
DownLoad: CSV| Address | Unit Postcode | OA.G | LSOA.G | MSOA.G | OA.W | LSOA.W | MSOA.W | ||
| Urban | Euclidean | ||||||||
| Median | 590 | 597 | 613 | 634 | 668 | 580 | 550 | 419 | |
| IQR | 623 | 623 | 649 | 737 | 778 | 623 | 608 | 340 | |
| Max. | 3,134 | 3,100 | 3,039 | 2,964 | 4,704 | 2,896 | 2,875 | 2,972 | |
| Network | |||||||||
| Median | 849 | 865 | 902 | 1,041 | 1,106 | 840 | 824 | 576 | |
| IQR | 829 | 836 | 895 | 922 | 1,170 | 818 | 790 | 578 | |
| Max. | 4,552 | 5,048 | 4,202 | 3,859 | 6,815 | 4,544 | 3,606 | 3,404 | |
| Rural | Euclidean | ||||||||
| Median | 1,377 | 1,413 | 1,525 | 1,770 | 1,811 | 1,312 | 1,125 | 879 | |
| IQR | 1,767 | 1,767 | 1,892 | 2,026 | 891 | 1,847 | 1,962 | 2,365 | |
| Max. | 7,255 | 8,329 | 6,060 | 5,532 | 4,704 | 6,961 | 4,683 | 3,384 | |
| Network | |||||||||
| Median | 1,809 | 1,941 | 2,037 | 2,830 | 2,550 | 1,766 | 1,381 | 1,120 | |
| IQR | 2,236 | 2,293 | 2,499 | 2,410 | 960 | 2,321 | 2,199 | 2,405 | |
| Max. | 11,410 | 12,270 | 9,854 | 10,220 | 6,815 | 9,107 | 8,018 | 4,002 | |
DownLoad: CSV| Urban | |||||||||
| Unit Postcode | OA.G | LSOA.G | MSOA.G | OA.W | LSOA.W | MSOA.W | |||
| Network | n | 0 | 3,650 | 11,427 | 21,926 | 33,755 | 7,327 | 16,329 | 35,534 |
| % | 0 | 3.8 | 11.8 | 22.6 | 34.8 | 7.7 | 16.8 | 36.6 | |
| Euclidean | n | 14,047 | 15,368 | 19,747 | 29,280 | 39,021 | 16,456 | 21,110 | 36,654 |
| % | 14.5 | 15.8 | 20.4 | 30.2 | 40.2 | 17.0 | 21.8 | 37.8 | |
| Rural | |||||||||
| Unit Postcode | OA.G | LSOA.G | MSOA.G | OA.W | LSOA.W | MSOA.W | |||
| Network | n | 0 | 138 | 642 | 1846 | 4946 | 459 | 1793 | 3713 |
| % | 0 | 1.1 | 5.1 | 14.6 | 39.2 | 3.6 | 14.2 | 29.5 | |
| Euclidean | n | 960 | 948 | 1457 | 1731 | 5489 | 1064 | 1678 | 3713 |
| % | 7.6 | 7.5 | 11.6 | 13.7 | 43.5 | 8.4 | 13.3 | 29.5 |
DownLoad: CSV| Spatial Unit | Average Population | Comparable International Units |
| Unit Postcode | 50 | Japan: Prefecture |
| OA | 100 | Australia: Meshblock |
| LSOA | 1500 | Japan: Municipality; USA: Block Group |
| MSOA | 7500 | USA: ZIP Codes; Australia: SA2s |
| Address | Unit Postcode | OA.G | LSOA.G | MSOA.G | OA.W | LSOA.W | MSOA.W | ||
| Urban | Euclidean | ||||||||
| Median | 590 | 597 | 613 | 634 | 668 | 580 | 550 | 419 | |
| IQR | 623 | 623 | 649 | 737 | 778 | 623 | 608 | 340 | |
| Max. | 3,134 | 3,100 | 3,039 | 2,964 | 4,704 | 2,896 | 2,875 | 2,972 | |
| Network | |||||||||
| Median | 849 | 865 | 902 | 1,041 | 1,106 | 840 | 824 | 576 | |
| IQR | 829 | 836 | 895 | 922 | 1,170 | 818 | 790 | 578 | |
| Max. | 4,552 | 5,048 | 4,202 | 3,859 | 6,815 | 4,544 | 3,606 | 3,404 | |
| Rural | Euclidean | ||||||||
| Median | 1,377 | 1,413 | 1,525 | 1,770 | 1,811 | 1,312 | 1,125 | 879 | |
| IQR | 1,767 | 1,767 | 1,892 | 2,026 | 891 | 1,847 | 1,962 | 2,365 | |
| Max. | 7,255 | 8,329 | 6,060 | 5,532 | 4,704 | 6,961 | 4,683 | 3,384 | |
| Network | |||||||||
| Median | 1,809 | 1,941 | 2,037 | 2,830 | 2,550 | 1,766 | 1,381 | 1,120 | |
| IQR | 2,236 | 2,293 | 2,499 | 2,410 | 960 | 2,321 | 2,199 | 2,405 | |
| Max. | 11,410 | 12,270 | 9,854 | 10,220 | 6,815 | 9,107 | 8,018 | 4,002 | |
| Urban | |||||||||
| Unit Postcode | OA.G | LSOA.G | MSOA.G | OA.W | LSOA.W | MSOA.W | |||
| Network | n | 0 | 3,650 | 11,427 | 21,926 | 33,755 | 7,327 | 16,329 | 35,534 |
| % | 0 | 3.8 | 11.8 | 22.6 | 34.8 | 7.7 | 16.8 | 36.6 | |
| Euclidean | n | 14,047 | 15,368 | 19,747 | 29,280 | 39,021 | 16,456 | 21,110 | 36,654 |
| % | 14.5 | 15.8 | 20.4 | 30.2 | 40.2 | 17.0 | 21.8 | 37.8 | |
| Rural | |||||||||
| Unit Postcode | OA.G | LSOA.G | MSOA.G | OA.W | LSOA.W | MSOA.W | |||
| Network | n | 0 | 138 | 642 | 1846 | 4946 | 459 | 1793 | 3713 |
| % | 0 | 1.1 | 5.1 | 14.6 | 39.2 | 3.6 | 14.2 | 29.5 | |
| Euclidean | n | 960 | 948 | 1457 | 1731 | 5489 | 1064 | 1678 | 3713 |
| % | 7.6 | 7.5 | 11.6 | 13.7 | 43.5 | 8.4 | 13.3 | 29.5 |





